
Level 1#
What is level 1#
This part is a tutorial type introduction. We assume users have read Aviary User Interface. In this doc page we discuss Level 1’s interface, but also other details, such as inputs and outputs.
If you have not yet, make sure to install Aviary.
To run Aviary in the Level 1 command-line interface (CLI), type this in a terminal:
!aviary
usage: aviary [-h] [--version] ...
aviary Command Line Tools
options:
-h, --help show this help message and exit
--version show version and exit
Tools:
check Verify Aviary installation
convert_aero_table Convert FLOPS- or GASP-formatted aero data files into
Aviary csv format.
convert_engine Convert FLOPS- or GASP-formatted engine decks into
Aviary csv format.
convert_prop_table Convert GASP-formatted propeller map file into Aviary
csv format.
dashboard Open the results dashboard for a provided Aviary run.
draw_mission Open the mission profile drawing GUI.
fortran_to_aviary Convert legacy Fortran (FLOPS OR GASP) input file to
Aviary input file.
hangar Copy aircraft and engine models included with Aviary
to specified folder. Allows users who did not install
Aviary locally to still access model files.
plot_drag_polar Plot a Drag Polar Graph using a provided polar data
csv input.
rtplot Run a script and show a real-time plot of the
optimization progress.
run_mission Run Aviary using a provided input deck.
We’ll now discuss the different parts of the CLI, starting with how to run an Aviary problem.
First level 1 run#
We are ready to run some models. By default, Aviary runs the optimizer for up to 50 iterations. In order to reduce the run time, we will limit the maximum number of iterations to 1. It will be faster for these examples, but you will not get optimal solutions.
Note: The following examples use the IPOPT optimizer, which is accessible by installing pyoptsparse. An example of a level 1 problem using the SLSQP optimizer is available in ‘run_level1_example.py’ in the aviary/examples directory.
Issue the following command:
!aviary run_mission models/aircraft/test_aircraft/aircraft_for_bench_GwGm.csv --optimizer IPOPT --max_iter 1
The argument models/aircraft/test_aircraft/aircraft_for_bench_GwGm.csv shows where the aircraft csv file lives. This argument must be one of the following three options:
an absolute path,
a relative path relative to the current working directory,
a relative path relative to the Aviary package,
a relative path relative to the Aviary models folder.
Aviary searches for the given dataset in this order. If a dataset file exists in multiple directories, the first one Aviary finds will be used.
Note
When you run Aviary all of the outputs will be saved in the location where you run the command or run script. Outputs files such as optimization history and Dymos output files are saved at that location. A folder named ‘report’ will also be created there, and contains all of the associated report files for your runs. These reports include optimization and trajectory reports generated by OpenMDAO and Dymos.
Warning messages#
During your first run you may notice some warning messages in the Aviary output. Frequently seen warnings are:
PromotionWarning: Issued when there is ambiguity due to variable promotion (an OpenMDAO warning).
RuntimeWarning: Issued for warnings about dubious runtime features (a Python warning).
UserWarning: Issued for warnings about potential OpenMDAO, Dymos, and/or Aviary problems.
DerivativesWarning: Issued when the approximated partials or coloring cannot be evaluated as expected (an OpenMDAO warning).
Some of these warnings are expected and can be ignored. For example, the following warnings are expected when running the aircraft_for_bench_GwGm.csv model:
'rhs_checking' is disabled for 'DirectSolver in 'traj.phases.desc1' <class Phase>' but that solver has redundant adjoint solves. If it is expensive to compute derivatives for this solver, turning on 'rhs_checking' may improve performance.
~/OpenMDAO/OpenMDAO/openmdao/core/total_jac.py:1670: DerivativesWarning:The following constraints or objectives cannot be impacted by the design variables of the problem at the current design point:
traj.climb2.mach[final], inds=[(11, 0)]
For now, we can ignore the warning messages and continue.
Level 1 run options#
In addition to a model input file, this option has additional options that are important, as seen here:
!aviary run_mission -h
usage: aviary run_mission [-h] [--optimizer {SNOPT,IPOPT,SLSQP,None}]
[--phase_info PHASE_INFO] [--max_iter MAX_ITER]
[--verbosity {0,1,2,3}]
indeck
positional arguments:
indeck Name of vehicle input deck file
options:
-h, --help show this help message and exit
--optimizer {SNOPT,IPOPT,SLSQP,None}
Name of optimizer
--phase_info PHASE_INFO
Path to phase info file
--max_iter MAX_ITER maximum number of iterations
--verbosity {0,1,2,3}
verbosity settings: 0=quiet, 1=brief, 2=verbose,
3=debug
Let us discuss these in more detail:
--optimizer: Name of optimizer. Choices are:SNOPT,IPOPT,SLSQP, andNone. The default isIPOPT. If optimizer isNone, it will be set toIPOPT. The optimization objective is fuel burn for level 1 runs. The objective ismission:objectives:fuelifmission_methodisGASPfuel_burnedifmission_methodisFLOPS.
--phase_info: Path to phase info file. If not provided, it is models/missions/two_dof_default.py if mission origin isTWO_DEGREES_OF_FREEDOMand models/missions/height_energy_default.py forHEIGHT_ENERGY.--max_iter: Maximum number of iterations. Default is 50.
For the aircraft_for_bench_GwGm.csv example so far, we have used the IPOPT optimizer because it is publicly available through pyOptSparse.
Aviary run_mission command#
The Level 1 CLI (i.e. run_mission option) is designed to offer the lowest barrier to entry for new users.
Analysts who have experience with legacy tools, such as FLOPS and GASP, should find the switch from FORTRAN namelists to csv-based input decks to be straightforward. Aviary input decks allow the user the ability to set aircraft characteristics and basic mission parameters,
such as cruise Mach number and altitude, in a simple text-based format that does not require any familiarity with Python or OpenMDAO.
Aviary can then be executed by calling aviary run_mission with the csv input deck.
Although the order of the variables in the input deck is not important, you might find it helpful to separate the variables based on if they’re used as initial guesses or in the metadata.
First aircraft model#
We have a few sample aircraft csv files in aviary/models. They are all .csv files. For example, aircraft_for_bench_GwGm.csv (in aviary/models/aircraft/test_aircraft) is a large single aisle aircraft mission model.
Open aircraft_for_bench_GwGm.csv using your favorite editor (e.g., MS Excel or VS Code). If you choose to use MS Excel, you need to take extra steps to make sure that it is in the original format. We recommend running dos2unix first (e.g. dos2unix aircraft_for_bench_GwGm.csv).
The file aircraft_for_bench_GwGm.csv is a data input file modeling large single aisle aircraft which was converted from a GASP input deck.
Here is a snippet of the file:
aircraft:air_conditioning:mass_coefficient,1.65,unitless
aircraft:anti_icing:mass,551,lbm
aircraft:apu:mass,928,lbm
......
mission:design:cruise_altitude,37500,ft
mission:design:gross_mass,175400,lbm
mission:design:mach,0.8,unitless
......
settings:aerodynamics_method,GASP
settings:equations_of_motion,2DOF
settings:mass_method,GASP
......
actual_takeoff_mass,0
climb_range,0
cruise_mass_final,0
......
INGASP.ALR,1.11
INGASP.BENGOB,0.05
INGASP.CINP,0.11
......
...
The input .csv file defines the aircraft and mission. In an Aviary input file you see a list of Aviary variables, their values, and units. Aviary variables are colon delimited strings (e.g. aircraft:wing:aspect_ratio). An Aviary variable name usually has three words. The first word is aircraft or mission, the second word is a subsystem name and the third is the variable name. Each variable has a value and units. Aviary requires units for every variable because it reduces errors and is a good engineering practice.
Note
If you have used the fortran_to_aviary tool to create a .csv file you must check the outputted variable values and units to ensure the file is valid and what you expect.
Be aware that some variables do not follow the standard naming format (e.g. climb_range). These are used for the initial guessing of the trajectory. They are intentionally separate to prevent conflicts with some similarly named variables. They are only used once to set up the problem and then are discarded.
Finally we see a list of GASP variables that are not converted. Not all variables are converted to Aviary right now. They may represent some features in FLOPS and GASP that we haven’t implemented in Aviary yet.
To find information about a variable (e.g. description, data type, etc.), users should read the Variable Metadata Doc.
Variable names may appear differently within the code from how they are formatted inside OpenMDAO components and in input files and outputs. This is because OpenMDAO requires variable names to be strings, but for developer convenience those strings are mapped to Python classes and attributes. The top-level and sub-categories have capitalized first letters, and the final variable name is always in all-caps. For more information on Aviary’s variable hierarchy, see the Variable Hierarchy doc.
File aviary/variable_info/variables.py is a variable hierarchy that is for a single mission. Each mission gets a copy of this hierarchy. Below is a snippet of this file:
"""
This is a variable hierarchy that is for a single mission. Each mission
gets a copy of this hierarchy.
"""
class Aircraft:
"""Aircraft data hierarchy."""
class AirConditioning:
MASS = 'aircraft:air_conditioning:mass'
MASS_COEFFICIENT = 'aircraft:air_conditioning:mass_coefficient'
MASS_SCALER = 'aircraft:air_conditioning:mass_scaler'
class AntiIcing:
MASS = 'aircraft:anti_icing:mass'
MASS_SCALER = 'aircraft:anti_icing:mass_scaler'
Aviary variables are always set to default values before the input file is read in. Then Aviary will update the values based on the user-provided .csv input file. If you want to set different values, you can set them in the .csv input file.
Other available input files#
Other input files reside in aviary/models. They include:
aviary/models/aircraft/advanced_single_aisle/advanced_single_aisle_FLOPS.csv
aviary/models/aircraft/large_single_aisle_1/large_single_aisle_1_GASP.csv
aviary/models/aircraft/small_single_aisle/small_single_aisle_GASP.csv
For example, to run large_single_aisle_1 model, you execute the following command:
!aviary run_mission models/aircraft/large_single_aisle_1/large_single_aisle_1_GASP.csv --max_iter 1 --optimizer IPOPT
For FLOPS-derived models, let us run:
!aviary run_mission models/aircraft/test_aircraft/aircraft_for_bench_FwFm.csv --max_iter 1 --optimizer IPOPT
Aviary fortran_to_aviary command#
Note
You only need to use the fortran_to_aviary command if you are converting a FLOPS or GASP deck to Aviary’s csv format.
This fortran_to_aviary tool (see Aviary Commands for details) converts FORTRAN namelists into Aviary’s csv based format using the mappings found in the historical_name section of the variable_meta_data. The resulting csv is automatically sorted into three sections:
Input Values: Any FORTRAN variables that were mapped to input variables in the variable metadata, converted to their equivalent Aviary names
Initial Guesses: Some variables are only used as initial guesses for the trajectory. These are displayed separately from the Input Values because they will not be passed directly to components
Unconverted Values: If the
fortran_to_aviaryconverter can’t find an Aviary variable that matches the FORTRAN variable, it is added to the end of the csv file. We recommend that you check this section after converting a namelist to ensure that there aren’t any variables you expected to be converted here. Many of these unconverted variables represent features or options that are not used in Aviary and can be ignored. Variables related to mission definition are important, but Aviary defines mission profiles in a significantly different way. Currently, the user must build a new mission definition file that recreates the mission. Aviary will ignore unconverted variables when loading the csv, so you can safely leave them.
Phase info#
Aviary runs depend not only on input *.csv files, but also on phase_info dictionaries. A phase_info dictionary defines the mission and any analysis settings used within Aviary. It is used by Aviary to build a mission trajectory (e.g., from take-off to landing).
A Python dictionary is a set of key-value pairs. Most keys in phase_info are self-explained. Users should read Dymos’ Phase Options. For more details about phase_info keys, especially their example usages, please read onboarding phase information.
Default TWO_DEGREES_OF_FREEDOM phases#
The aviary/models/missions/two_dof_default.py file is shown below:
phase_info = {
'groundroll': {
'subsystem_options': {'aerodynamics': {'method': 'low_speed'}},
'user_options': {
'phase_type': PhaseType.TWO_DOF_TAKEOFF,
'ground_roll': True,
'num_segments': 1,
'order': 3,
'time_initial': (0.0, 's'),
'time_duration_ref': (50.0, 's'),
'time_duration_bounds': ((1.0, 100.0), 's'),
'velocity_initial': (0.066, 'kn'),
'velocity_bounds': ((0, 1000), 'kn'),
'velocity_ref': (150, 'kn'),
'mass_bounds': ((0, None), 'lbm'),
'mass_ref': (150_000, 'lbm'),
'mass_defect_ref': (150_000, 'lbm'),
'distance_initial': (0.0, 'ft'),
'distance_bounds': ((0, 10.0e3), 'ft'),
'distance_ref': (3000, 'ft'),
'distance_defect_ref': (3000, 'ft'),
},
'initial_guesses': {
'time': ([0.0, 40.0], 's'),
'velocity': ([0.066, 143.1], 'kn'),
'distance': ([0.0, 1000.0], 'ft'),
'throttle': ([0.956, 0.956], 'unitless'),
},
},
'rotation': {
'subsystem_options': {'aerodynamics': {'method': 'low_speed'}},
'user_options': {
'phase_type': PhaseType.TWO_DOF_TAKEOFF,
'rotation': True,
'num_segments': 1,
'order': 3,
'time_duration_bounds': ((1, 100), 's'),
'time_duration_ref': (50.0, 's'),
'velocity_bounds': ((0, 1000), 'kn'),
'velocity_ref': (150, 'kn'),
'mass_bounds': ((0, None), 'lbm'),
'mass_ref': (150_000, 'lbm'),
'mass_defect_ref': (150_000, 'lbm'),
'distance_bounds': ((0, 10.0e3), 'ft'),
'distance_ref': (5000, 'ft'),
'distance_defect_ref': (5000, 'ft'),
'angle_of_attack_initial': (0.0, 'deg'),
'angle_of_attack_bounds': ((0.0, 12.0), 'deg'),
'angle_of_attack_ref': (12.0, 'deg'),
'angle_of_attack_defect_ref': (12.0, 'deg'),
'normal_ref': (10000, 'lbf'),
},
'initial_guesses': {
'time': ([40.0, 5.0], 's'),
'angle_of_attack': ([0.0, 2.5], 'deg'),
'velocity': ([143, 150.0], 'kn'),
'distance': ([3680.37217765, 4000], 'ft'),
'throttle': ([0.956, 0.956], 'unitless'),
},
},
'ascent': {
'subsystem_options': {'aerodynamics': {'method': 'low_speed'}},
'user_options': {
'phase_type': PhaseType.TWO_DOF_TAKEOFF,
'num_segments': 4,
'order': 3,
'velocity_bounds': ((0, 700), 'kn'),
'velocity_ref': (200, 'kn'),
'time_duration_ref': (10, 's'),
'mass_bounds': ((0, None), 'lbm'),
'mass_ref': (150_000, 'lbm'),
'mass_defect_ref': (150_000, 'lbm'),
'distance_bounds': ((0, 15_000), 'ft'),
'distance_ref': (1e4, 'ft'),
'distance_defect_ref': (1e4, 'ft'),
'altitude_bounds': ((0.0, 700.0), 'ft'),
'altitude_ref': (1000, 'ft'),
'altitude_defect_ref': (1000, 'ft'),
'altitude_initial': (0, 'ft'),
'altitude_final': (500, 'ft'),
'altitude_constraint_ref': (500, 'ft'),
'flight_path_angle_bounds': ((-10.0, 20.0), 'deg'),
'flight_path_angle_ref': (57.2958, 'deg'),
'flight_path_angle_defect_ref': (57.2958, 'deg'),
'flight_path_angle_initial': (0.0, 'deg'),
'pitch_constraint_bounds': ((0.0, 15.0), 'deg'),
'pitch_constraint_ref': (1.0, 'deg'),
},
'initial_guesses': {
'time': ([45.0, 25.0], 's'),
'flight_path_angle': ([0.0, 8.0], 'deg'),
'angle_of_attack': ([2.5, 1.5], 'deg'),
'velocity': ([150.0, 185.0], 'kn'),
'distance': ([4.0e3, 10.0e3], 'ft'),
'altitude': ([0.0, 500.0], 'ft'),
'tau_gear': (0.2, 'unitless'),
'tau_flaps': (0.9, 'unitless'),
'throttle': ([0.956, 0.956], 'unitless'),
},
},
'accel': {
'subsystem_options': {'aerodynamics': {'method': 'cruise'}},
'user_options': {
'phase_type': PhaseType.ACCEL,
'num_segments': 1,
'order': 3,
'alt': (500, 'ft'),
'EAS_constraint_eq': (250, 'kn'),
'time_duration_bounds': ((1, 200), 's'),
'time_duration_ref': (1000, 's'),
'velocity_bounds': ((150, 270), 'kn'),
'velocity_ref': (250, 'kn'),
'velocity_ref0': (150, 'kn'),
'mass_bounds': ((0, None), 'lbm'),
'mass_ref': (150_000, 'lbm'),
'mass_defect_ref': (150_000, 'lbm'),
'distance_bounds': ((0, 150.0), 'NM'),
'distance_ref': (5, 'NM'),
'distance_defect_ref': (5, 'NM'),
},
'initial_guesses': {
'time': ([70.0, 13.0], 's'),
'velocity': ([185.0, 250.0], 'kn'),
'distance': ([10.0e3, 20.0e3], 'ft'),
'throttle': ([0.956, 0.956], 'unitless'),
},
},
'climb1': {
'subsystem_options': {'aerodynamics': {'method': 'cruise'}},
'user_options': {
'num_segments': 1,
'order': 3,
'EAS_target': (250, 'kn'),
'mach_target': 0.8,
'time_duration_bounds': ((30, 300), 's'),
'time_duration_ref': (1000, 's'),
'altitude_initial': (500.0, 'ft'),
'altitude_final': (10.0e3, 'ft'),
'altitude_bounds': ((400.0, 11_000.0), 'ft'),
'altitude_ref': (10.0e3, 'ft'),
'mass_bounds': ((0, None), 'lbm'),
'mass_ref': (150_000, 'lbm'),
'mass_defect_ref': (150_000, 'lbm'),
'distance_bounds': ((0, 500.0), 'NM'),
'distance_ref': (10, 'NM'),
},
'initial_guesses': {
'time': ([1.0, 2.0], 'min'),
'distance': ([20.0e3, 100.0e3], 'ft'),
'altitude': ([500.0, 10.0e3], 'ft'),
'throttle': ([0.956, 0.956], 'unitless'),
},
},
'climb2': {
'subsystem_options': {'aerodynamics': {'method': 'cruise'}},
'user_options': {
'num_segments': 3,
'order': 3,
'EAS_target': (270, 'kn'),
'mach_target': 0.8,
'required_available_climb_rate': (0.1, 'ft/min'),
'time_duration_bounds': ((200, 17_000), 's'),
'time_duration_ref': (5000, 's'),
'altitude_final': (37.5e3, 'ft'),
'altitude_bounds': ((9000.0, 40000.0), 'ft'),
'altitude_ref': (30000, 'ft'),
'mass_bounds': ((0, None), 'lbm'),
'mass_ref': (150_000, 'lbm'),
'mass_defect_ref': (150_000, 'lbm'),
'distance_bounds': ((10.0, 1000.0), 'NM'),
'distance_ref': (500, 'NM'),
'distance_defect_ref': (500, 'NM'),
},
'initial_guesses': {
'time': ([216.0, 1300.0], 's'),
'distance': ([100.0e3, 200.0e3], 'ft'),
'altitude': ([10.0e3, 37.5e3], 'ft'),
'throttle': ([0.956, 0.956], 'unitless'),
},
},
'cruise': {
'subsystem_options': {'aerodynamics': {'method': 'cruise'}},
'user_options': {
'phase_type': PhaseType.SIMPLE_CRUISE,
'alt_cruise': (37.5e3, 'ft'),
'mach_cruise': 0.8,
'mass_bounds': ((0, None), 'lbm'),
'mass_ref': (150_000, 'lbm'),
'time_duration_bounds': ((0.0, 15.0), 'h'),
'time_duration_ref': (8, 'h'),
},
'initial_guesses': {
'mass': ([171481.0, 135000], 'lbm'),
'time': ([1516.0, 26500.0], 's'),
},
},
'desc1': {
'subsystem_options': {'aerodynamics': {'method': 'cruise'}},
'user_options': {
'num_segments': 3,
'order': 3,
'EAS_target': (350, 'kn'),
'mach_target': 0.8,
'input_speed_type': SpeedType.MACH,
'time_duration_bounds': ((300.0, 900.0), 's'),
'time_duration_ref': (1000, 's'),
'altitude_final': (10.0e3, 'ft'),
'altitude_bounds': ((1000.0, 40_000.0), 'ft'),
'altitude_ref': (30_000, 'ft'),
'altitude_constraint_ref': (10000, 'ft'),
'mass_bounds': ((0, None), 'lbm'),
'mass_ref': (140_000, 'lbm'),
'mass_defect_ref': (140_000, 'lbm'),
'distance_bounds': ((0.0, 5000.0), 'NM'),
'distance_ref': (mission_distance, 'NM'),
'distance_defect_ref': (100, 'NM'),
},
'initial_guesses': {
'mass': (136000.0, 'lbm'),
'altitude': ([37.5e3, 10.0e3], 'ft'),
'throttle': ([0.0, 0.0], 'unitless'),
'distance': ([0.92 * mission_distance, 0.96 * mission_distance], 'NM'),
'time': ([28000.0, 500.0], 's'),
},
},
'desc2': {
'subsystem_options': {'aerodynamics': {'method': 'cruise'}},
'user_options': {
'num_segments': 1,
'order': 7,
'EAS_target': (250, 'kn'),
'mach_target': 0.80,
'input_speed_type': SpeedType.EAS,
'time_duration_bounds': ((100.0, 5000), 's'),
'time_duration_ref': (500, 's'),
'altitude_final': (1000, 'ft'),
'altitude_bounds': ((500.0, 11_000.0), 'ft'),
'altitude_ref': (10.0e3, 'ft'),
'altitude_ref0': (1000, 'ft'),
'altitude_constraint_ref': (1000, 'ft'),
'mass_bounds': ((0, None), 'lbm'),
'mass_ref': (150_000, 'lbm'),
'mass_defect_ref': (150_000, 'lbm'),
'distance_bounds': ((0.0, 5000.0), 'NM'),
'distance_ref': (3500, 'NM'),
'distance_defect_ref': (100, 'NM'),
},
'initial_guesses': {
'mass': (136000.0, 'lbm'),
'altitude': ([10.0e3, 1.0e3], 'ft'),
'throttle': ([0.0, 0.0], 'unitless'),
'distance': ([0.96 * mission_distance, mission_distance], 'NM'),
'time': ([28500.0, 500.0], 's'),
},
},
}
def phase_info_parameterization(phase_info, post_mission_info, aviary_inputs):
"""
Modify the values in the phase_info dictionary to accommodate different values
for the following mission design inputs: cruise altitude, cruise Mach number,
cruise range, design gross mass.
Parameters
----------
phase_info : dict
Dictionary of phase settings for a mission profile
post_mission_info : dict
Dictionary of phase settings for a post mission profile
aviary_inputs : <AviaryValues>
Object containing values and units for all aviary inputs and options
Returns
-------
dict
Modified phase_info that has been changed to match the new mission
parameters
"""
range_cruise = aviary_inputs.get_val(Mission.Design.RANGE, units='NM')
alt_cruise = aviary_inputs.get_val(Mission.Design.CRUISE_ALTITUDE, units='ft')
gross_mass = aviary_inputs.get_val(Mission.Design.GROSS_MASS, units='lbm')
mach_cruise = aviary_inputs.get_val(Mission.Design.MACH)
# Range
old_range_cruise = phase_info['desc2']['initial_guesses']['distance'][0][1]
range_scale = 1.0
if range_cruise != old_range_cruise:
phase_info['desc1']['initial_guesses']['distance'] = (
[0.92 * range_cruise, 0.96 * range_cruise],
'NM',
)
phase_info['desc2']['initial_guesses']['distance'] = (
[0.96 * range_cruise, range_cruise],
'NM',
)
range_scale = range_cruise / old_range_cruise
# Altitude
old_alt_cruise = phase_info['cruise']['user_options']['alt_cruise'][0]
if alt_cruise != old_alt_cruise:
phase_info['climb2']['user_options']['altitude_final'] = (alt_cruise, 'ft')
phase_info['climb2']['initial_guesses']['altitude'] = ([10.0e3, alt_cruise], 'ft')
phase_info['cruise']['user_options']['alt_cruise'] = (alt_cruise, 'ft')
phase_info['desc1']['initial_guesses']['altitude'] = ([alt_cruise, 10.0e3], 'ft')
# TODO - Could adjust time guesses/bounds in climb2 and desc2.
# Mass
old_gross_mass = 175400.0
if gross_mass != old_gross_mass:
# Note, this requires that the guess for gross mass is pretty close to the
# compute mass.
fuel_used = 35000 * range_scale
phase_info['groundroll']['initial_guesses']['mass'] = ([gross_mass, gross_mass], 'lbm')
phase_info['rotation']['initial_guesses']['mass'] = ([gross_mass, gross_mass], 'lbm')
phase_info['accel']['initial_guesses']['mass'] = ([gross_mass, gross_mass], 'lbm')
phase_info['ascent']['initial_guesses']['mass'] = ([gross_mass, gross_mass], 'lbm')
phase_info['cruise']['initial_guesses']['mass'] = ([gross_mass, -fuel_used], 'lbm')
end_mass = gross_mass - fuel_used
phase_info['desc1']['initial_guesses']['mass'] = (end_mass, 'lbm')
phase_info['desc2']['initial_guesses']['mass'] = (end_mass, 'lbm')
# Mach
old_mach_cruise = phase_info['cruise']['user_options']['mach_cruise']
if mach_cruise != old_mach_cruise:
phase_info['cruise']['user_options']['mach_cruise'] = (mach_cruise, 'unitless')
return phase_info, post_mission_info
The file two_dof_default.py contains the following phases:
groundroll, rotation, ascent, accel, climb1, climb2, cruise, desc1, desc2.
All of the above phases belong to mission. No pre-mission phase is provided. If pre_mission is missing, a default pre_mission is provided:
'pre_mission': {
'include_takeoff': True,
}
Similarly, if no post-mission phase is provided, then a default post_mission is provided:
'post_mission': {
'include_landing': True,
},
For `GASP’ missions, taxi is considered part of pre-mission and landing is considered part of post-mission.
Groundroll phase#
Let us discuss the groundroll phase in detail as an example.
In groundroll phase, we are given time_duration_bounds of range ((1.0, 100.0), 's') and a reference value time_duration_ref of value (50.0, 's'). Here, time_duration_bounds is a tuple of (lower, upper) bounds for the duration of the integration variable across the phase and time_duration_ref is the unit-reference value for the duration of the integration variable across the phase (see Dymos Variables). This implies a time range of (0.02, 2.0) in groundroll phase, or:
0.02 ≤ traj.groundroll.t_duration ≤ 2.0.
We see velocity_bounds with lower and upper bound values of ((0, 1000), 'kn'), and velocity_ref of value (150, 'kn'). They result in velocity as a design variable with a range: (0.0, 6.666666666666667), or
0.0 ≤ traj.groundroll.states:velocity ≤ 6.666666666666667.
Similarly, we get:
0.0 ≤ traj.groundroll.states:distance ≤ 3.3333333333333335
The mass parameter is a little bit different because we have mass_bounds: ((0, None), 'lbm'). In this situation, OpenMDAO replaces mass_upper with an actual upper bound that is very large. We get:
0.0 ≤ traj.groundroll.states:mass ≤ 6.66667e+15.
Comparing to velocity and distance, mass is not scaled to the same range. This is okay because aircraft mass is actually a constant in this phase. A huge upper bound will not have an impact.
For the COLLOCATION setting, there is one segment ('num_segments': 1) and polynomial interpolation degree is 3 ('order': 3). Increasing the number of segments and/or increasing the degree of polynomial will improve accuracy but will also increase the complexity of computation. For groundroll, it is unnecessary.
For parameter mass_defect_ref, we set values to (150000, 'lbm'). Defect is a residual that measures how accurately the proposed state and control history obeyed the ODE governing the system dynamics. For distance, the defect reference distance_ref is (3000, 'ft') ft.
Other phases#
We will not discuss the other phases in detail.
Roughly speaking, phase climb1 is for climb up to 10,000 ft and phase climb2 is for climb to cruise phase. Phase desc1 is for descent down to 10,000 ft and phase desc2 is for descent from 10,000 ft down to 1,000 ft.
Default HEIGHT_ENERGY phases#
The file aviary/models/missions/height_energy_default.py contains the following phases:
pre_mission, climb, cruise, descent, post_mission
The differences between HEIGHT_ENERGY and TWO_DEGREES_OF_FREEDOM phases are due to how FLOPS and GASP implement trajectory analysis.
Note
File aviary/models/missions/height_energy_default.py has a pre_mission phase and a post_mission phase. In pre_mission, takeoff is the simplified takeoff and in post_mission, landing is the simplified landing. For HEIGHT_ENERGY missions, there are detailed takeoff and landing available. But they are not used in height_energy_default.py. The other phases are mission phases.
Outputted files and how to read them#
Note
Please also see this doc page for more info about the Aviary dashboard and the information is contains. We usually expect that users access these reports through the dashboard, though you can also access the html files directly.
Each standard run generates several output files. Which output files are generated depend on the run options. In this section, we assume that we’ve set max_iter = 50 to ensure convergence. The following screenshots used in this article are all from a run using aircraft_for_bench_GwGm.csv.
First, there is always a sub-folder reports/case_name where case_name is the csv file name. In our case, it is reports/aircraft_for_bench_GwGm. It contains a few HTML files:
driver_scaling_report.htmlinputs.htmln2.htmlopt_report.htmltotal_coloring.htmltraj_linkage_report.htmltraj_results_report.html
File driver_scaling_report.html#
This file is a summary of driver scaling information. After all design variables, objectives, and constraints are declared and the problem has been set up, this report presents all the design variables and constraints in all phases as well as the objectives. The file is divided to three blocks: Design Variables, Constraints, and Objectives. It contains the following columns: name, size, indices, driver value and units, model value and units, ref, ref0, scaler, adder, etc. It also shows Jacobian Info - responses with respect to design variables (DV). A screen shot of design variables is shown here:
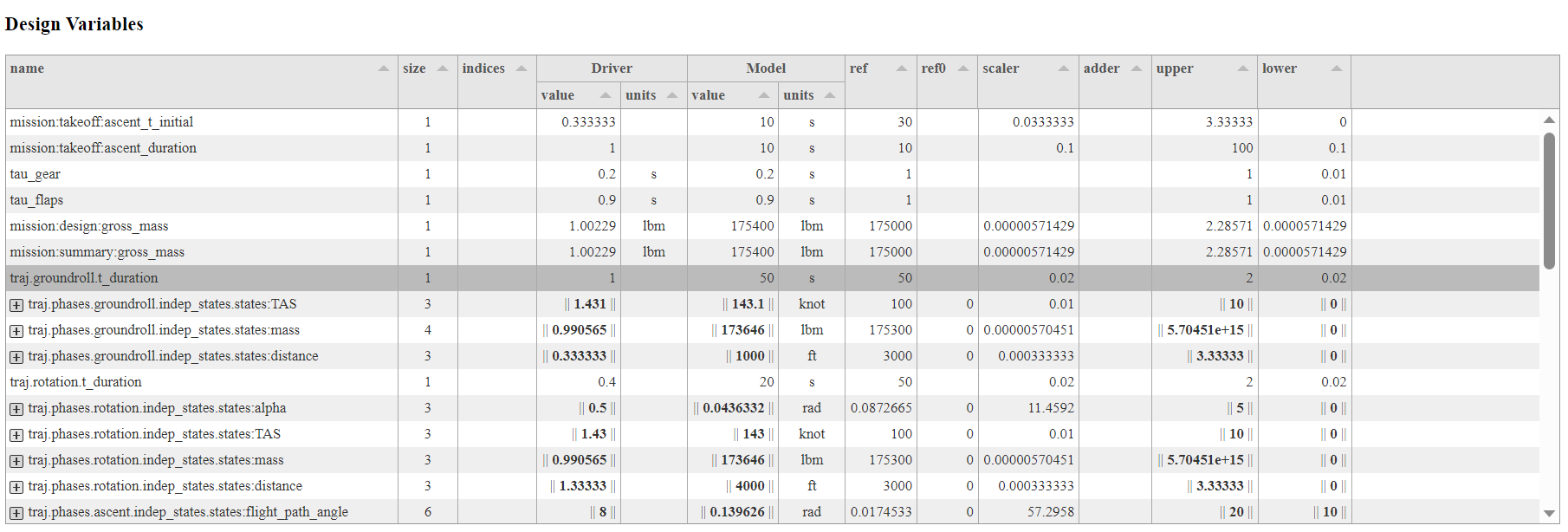
This file is needed when you are debugging. New users can skip it.
File inputs.html#
File inputs.html is a sortable and filterable input report of input variables in different phases. It contains all the input variables (with possibly duplicate names for different phases) but only shows those in Source is IVC (abbreviation for IndepVarComp) on opening up. Users can choose to show other inputs by selecting and deselecting this checkbox. Users can filter their inputs by input name, source name, units, shape, tags, values (Val), or design variables (Source is DV). Here is a screen shot (top part) when it is opened:
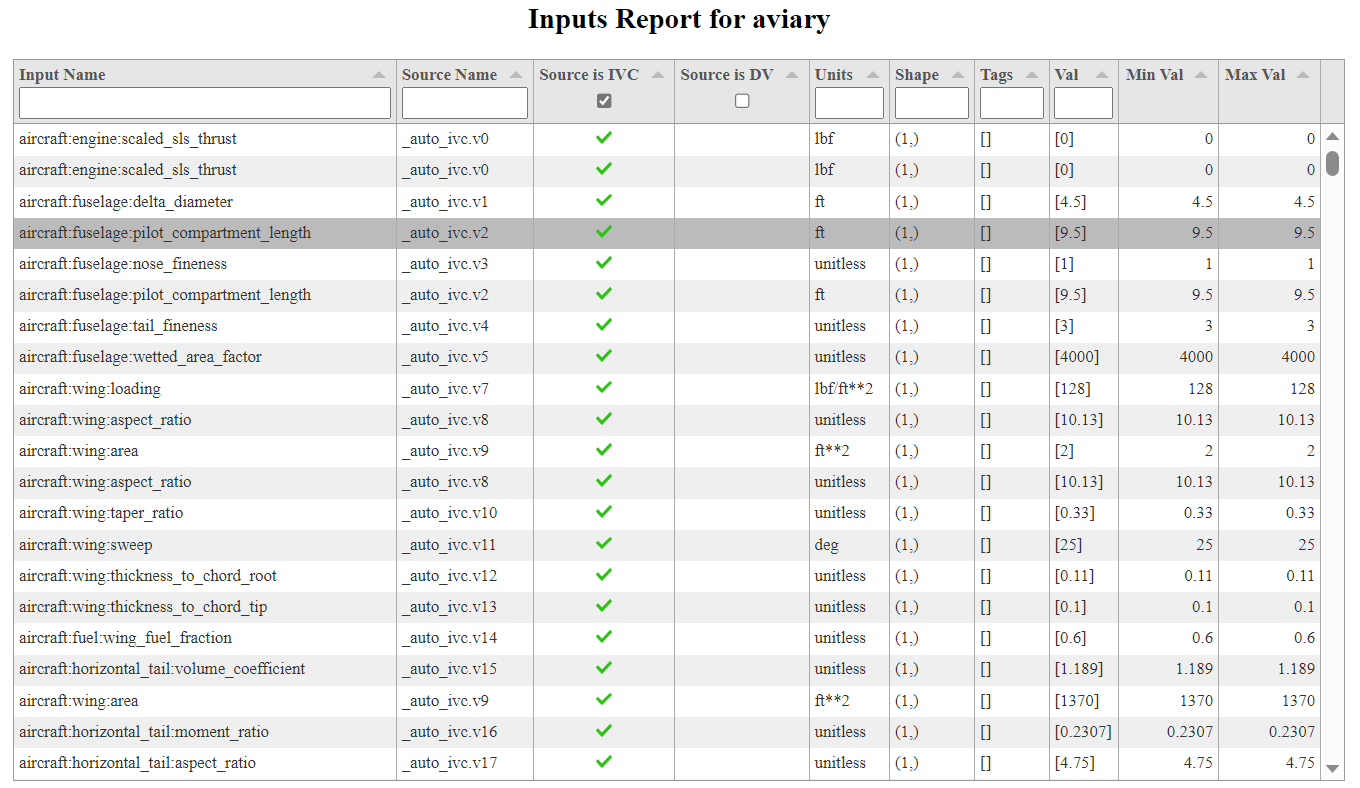
New users can choose to use input_list.txt instead (see below) if settings:verbosity is set to 2 or higher. Note that this file lives in the current folder.
File n2.html#
N2, sometimes referred to as an eXtended Design Structure Matrix (XDSM), is a powerful tool for understanding your model in OpenMDAO. It is an N-squared diagram in the shape of a matrix representing functional or physical interfaces between system elements. It can be used to systematically identify, define, tabulate, design, and analyze functional and physical interfaces.
Note
We strongly recommend that you understand N2 diagrams well, especially if you are debugging a model or adding external subsystems. Here is a doc page featuring an informative video on how to use N2 diagrams effectively. MDO lab has another resource for learning about N2 and XDSM.
Here is a screenshot of an N2 diagram after we run aviary run_mission models/aircraft/test_aircraft/aircraft_for_bench_GwGm.csv.
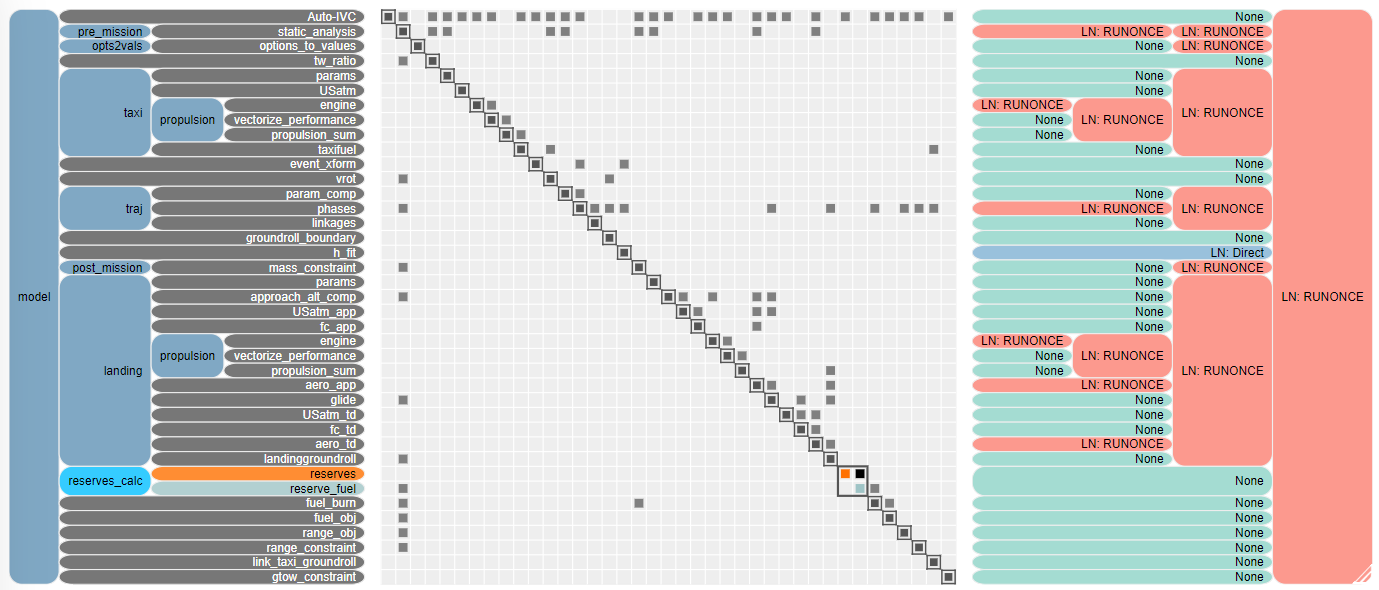
At level 1, we are interested in the phases, so let us Hide solvers. So from model, zoom into traj, then into phases. We see the phases from groundroll to desc2 as expected. To see how those phases are connected, we click on Show all connections in view. Here is what we see:
The solid arrow connections show how outputs of one phase feed as inputs to the next. As you can see, the input of each phase is linked from the previous phase and its output is linked to the next phase. This is pretty much what we expect. The dashed arrows are links to and/or from other places not in the view. If you are curious where those links go, you must zoom out. This can be done by clicking the vertical bar on the left. Let us click it twice. Here is what we get:
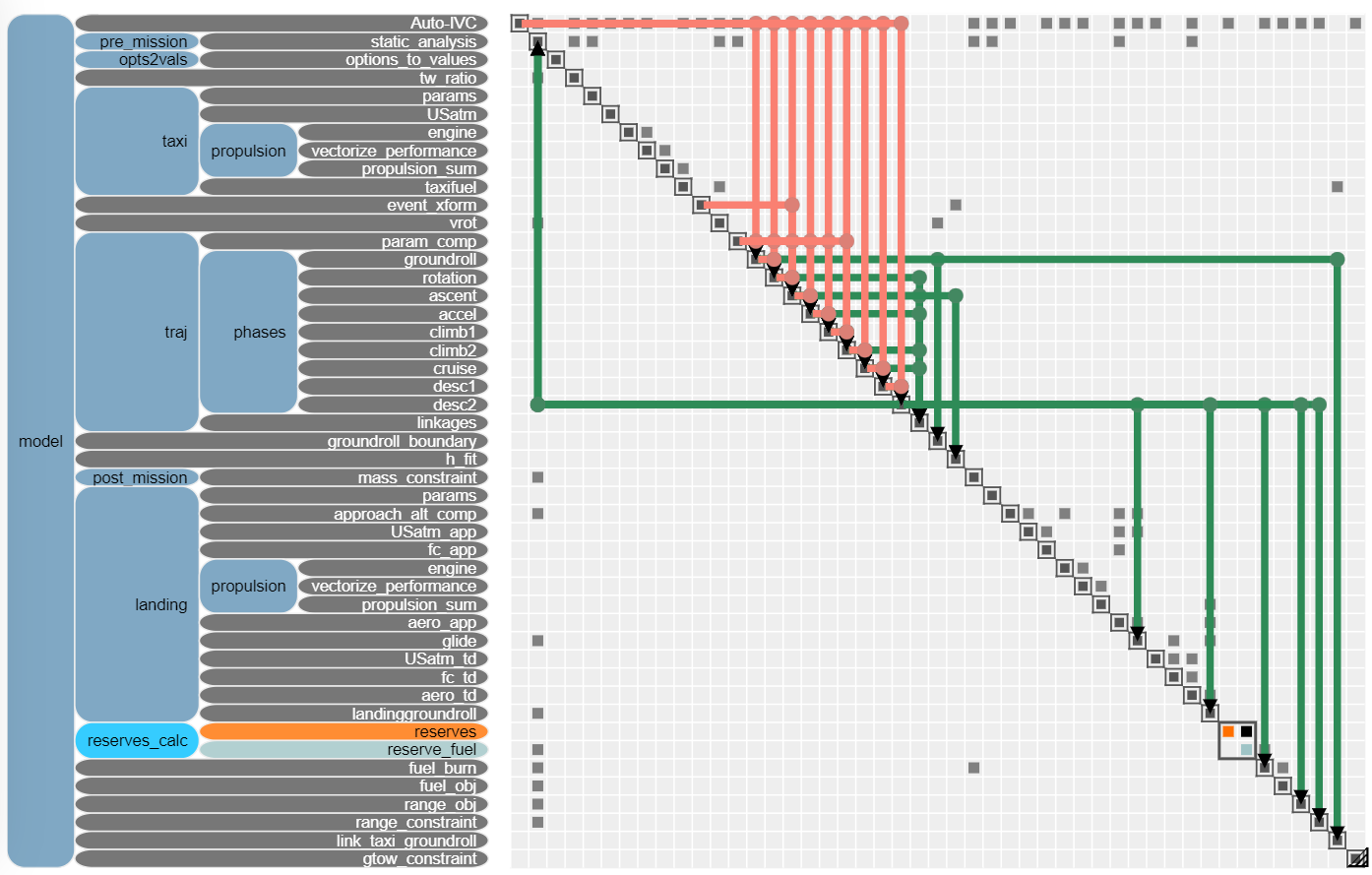
For TWO_DEGREES_OF_FREEDOM missions, there is a takeoff subsystem (including taxi phase) within pre_mission. For HEIGHT_ENERGY missions, there is a takeoff subsystem within pre_mission in which a takeoff phase is added. It is added after static_analysis in add_pre_mission_systems() method.
Similarly, there is a landing phase within post_mission.
File opt_report.html#
This file is OpenMDAO Optimization Report. All values are in unscaled, physical units. On the top is a summary of the optimization, followed by the objective, design variables, constraints, and optimizer settings. Here is a screenshot:
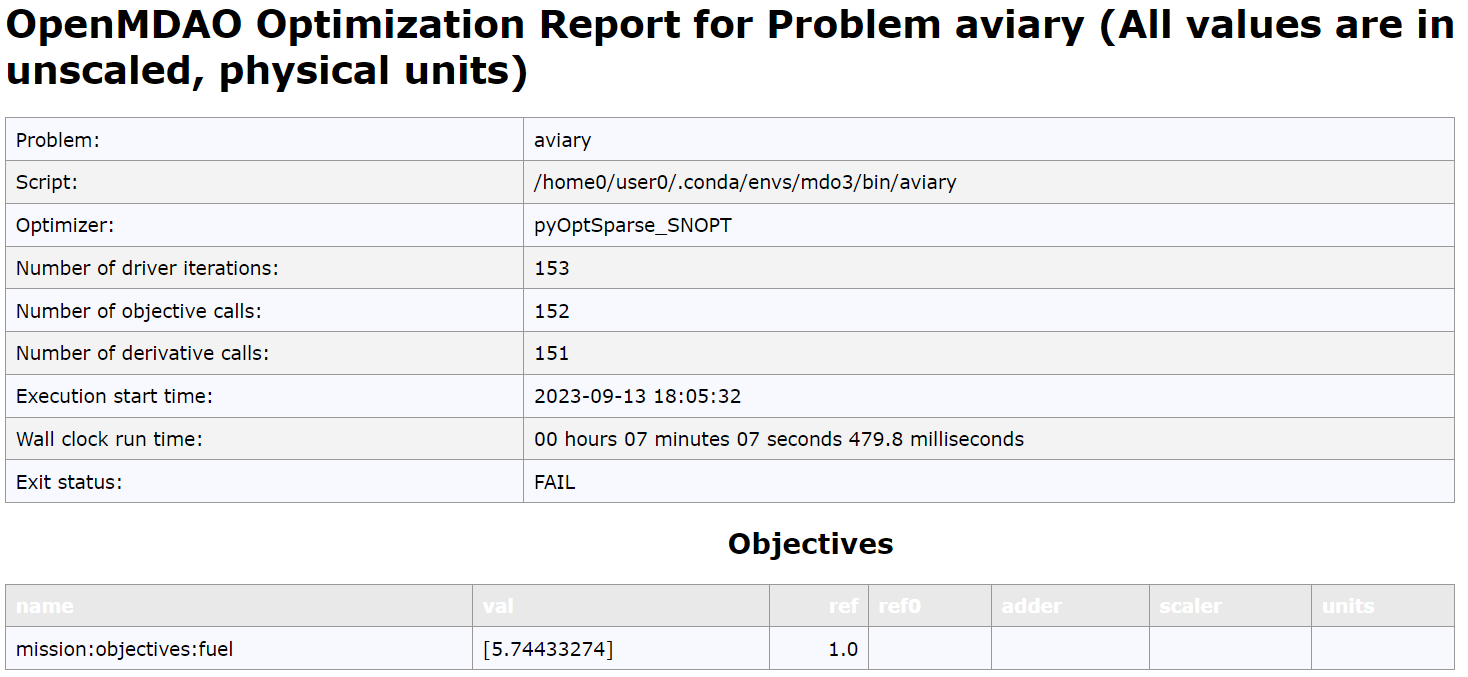
This file is important when dissecting optimal results produced by Aviary.
Coloring files#
There is a sub-folder coloring_files. Those are used internally by OpenMDAO for derivative computation. Users should generally skip those files.
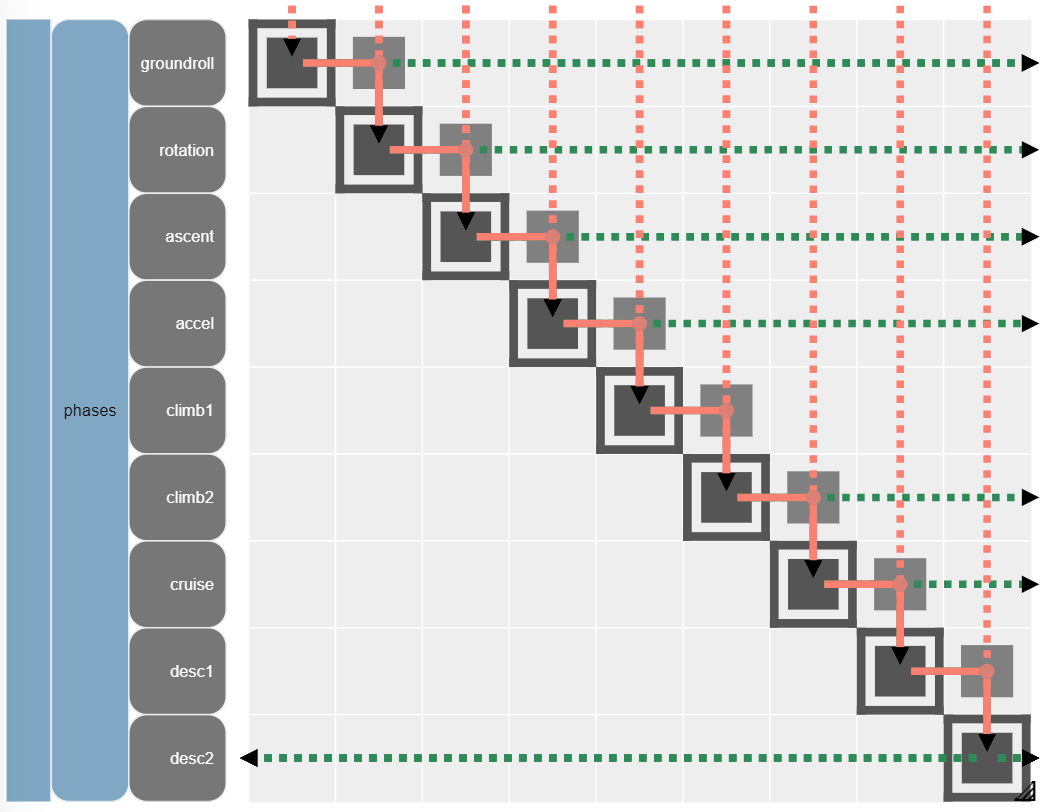
File traj_linkage_report.html#
This is a dymos linkage report in a customized N2 diagram. It provides a report detailing how phases are linked together via constraint or connection. It can be used to identify errant linkages between fixed quantities.
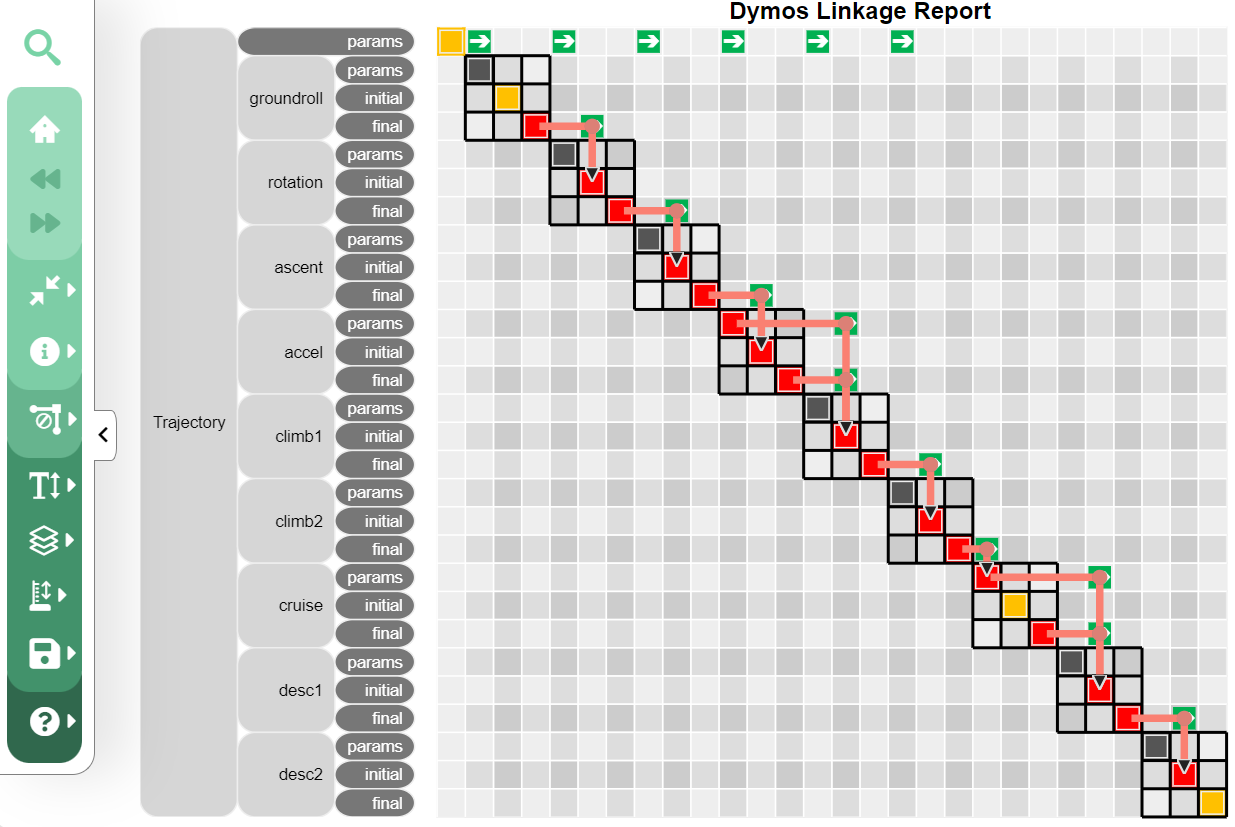
We clearly see how those mission phases are linked.
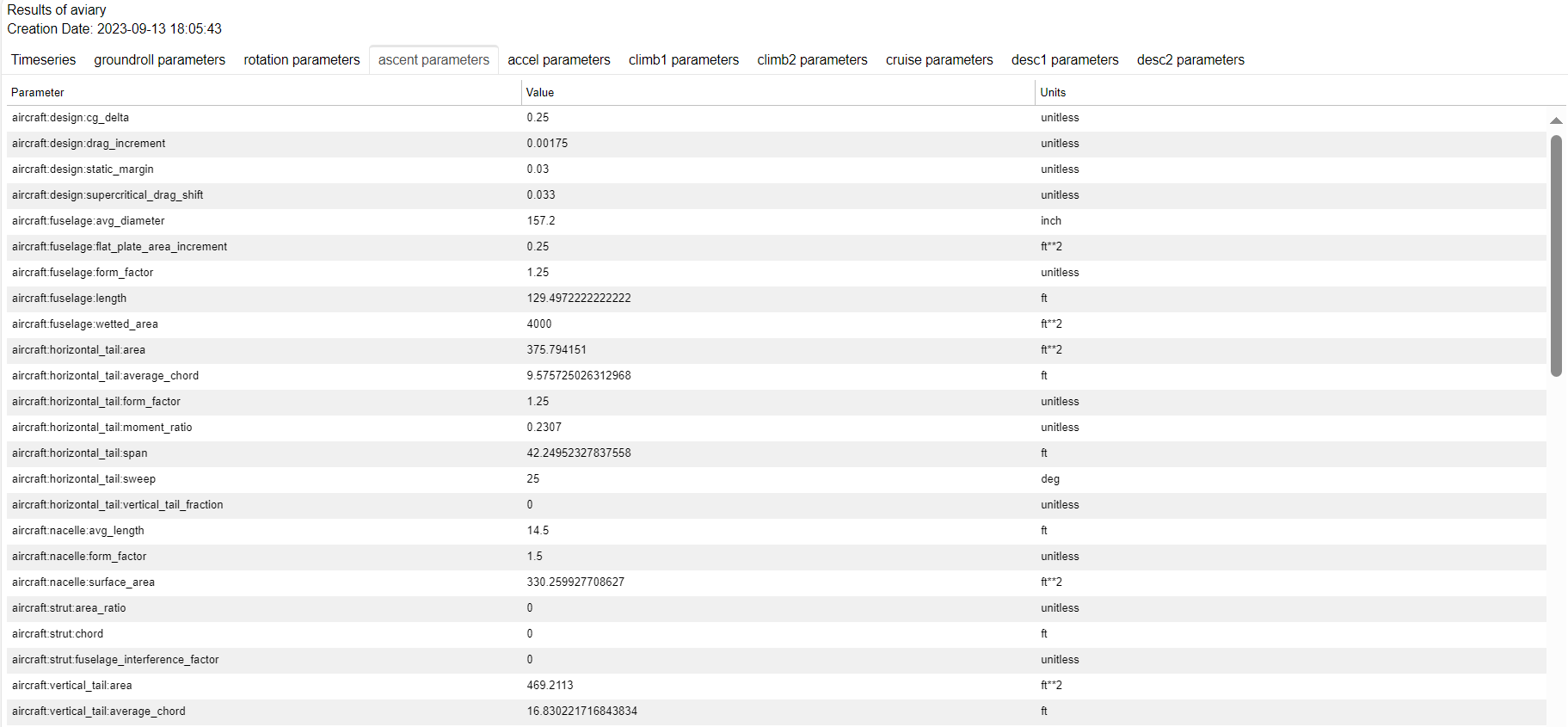
File traj_results_report.html#
Note
This is one of the most important files produced by Aviary. It will help you visualize and understand the optimal trajectory produced by Aviary.
This file contains timeseries and phase parameters in different tabs. For our aircraft_for_bench_GwGm run, they are: groundroll, rotation, ascent, accel, climb1, climb2, cruise, desc1, and desc2 parameters. On the timeseries tab, users can select which phases to view. The following are the top of timeseries tab and ascent parameters tab:
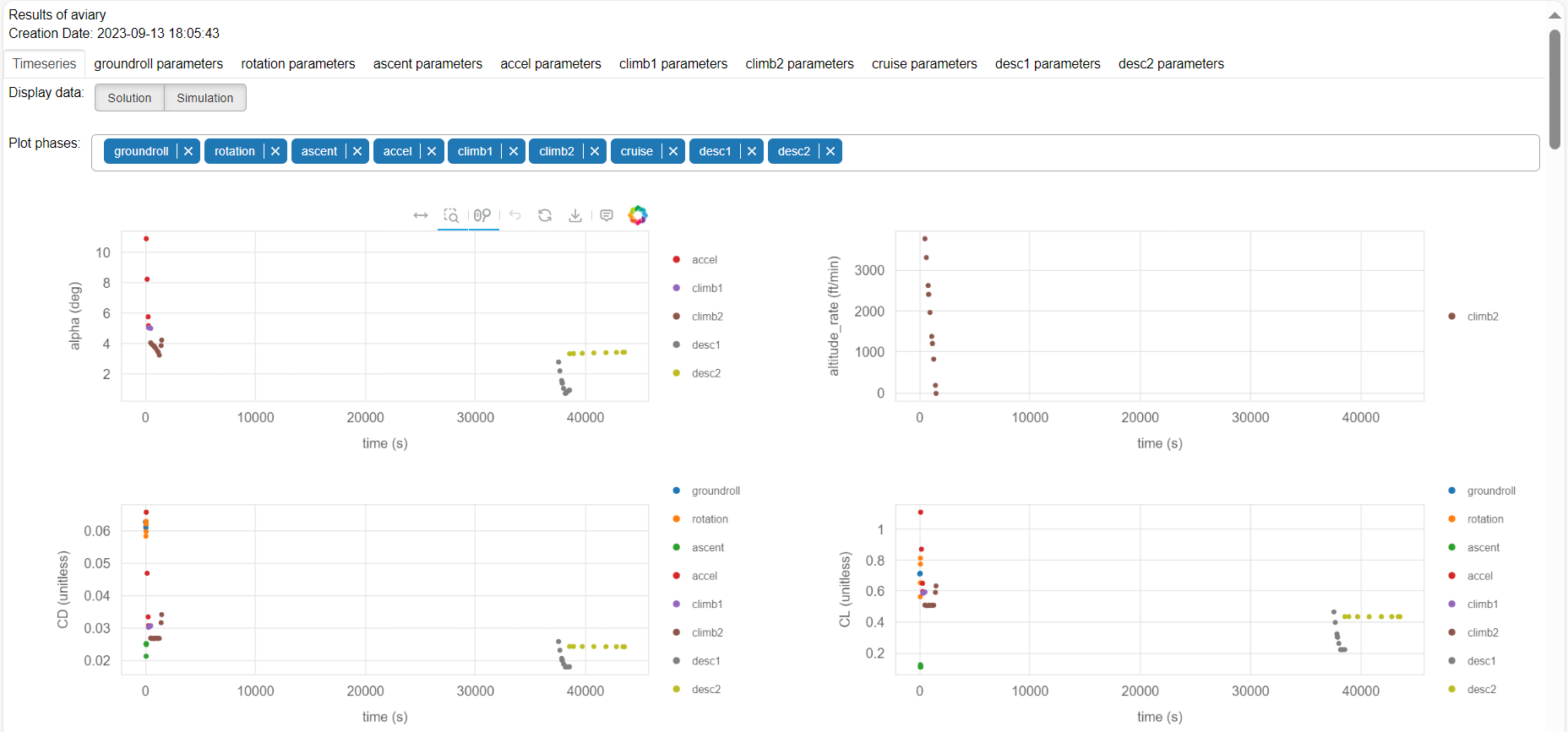
Let’s find the altitude chart. Move the cursor to the top of climb2. We see that the aircraft climbs to 37500 feet at 1200 second. Then it enters to cruise phase. At 28090 second, it starts descent from 40000 feet.
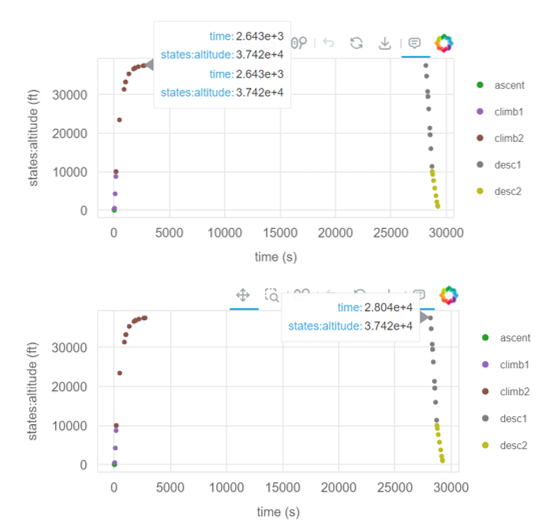
Let’s switch to ascent tab. We see the following:
This file is quite important. Users should play with it and try to grasp all possible features. For example, you can hover the mouse over the solution points to see solution value; you can save the interesting images; you can zoom into a particular region for details, etc.
Optimizer output#
If IPOPT is the optimizer, IPOPT.out is generated. If SLSQP is the optimizer and pyOptSparseDriver is the driver, SLSQP.out is generated. Generally speaking, IPOPT and SNOPT converge Aviary optimization problems better than SLSQP, but SLSQP is bundled with Scipy by default, making it more widely available.
SQLite database file#
There is a .db file created after run called {glue:md}’problem_history.db’ in the report directory. This is an SQLite database file. Our run is recorded into this file. You generally shouldn’t need to parse through this file on your own, but it is available if you’re seeking additional problem information.
Plain text inputs and outputs#
If VERBOSITY is set to 2 (VERBOSE) or higher, input_list.txt and output_list.txt are generated. We recommend this parameter be set to 1 (BRIEF) for beginners. See Coding Standards for more details.
Let us look at input_list.txt:
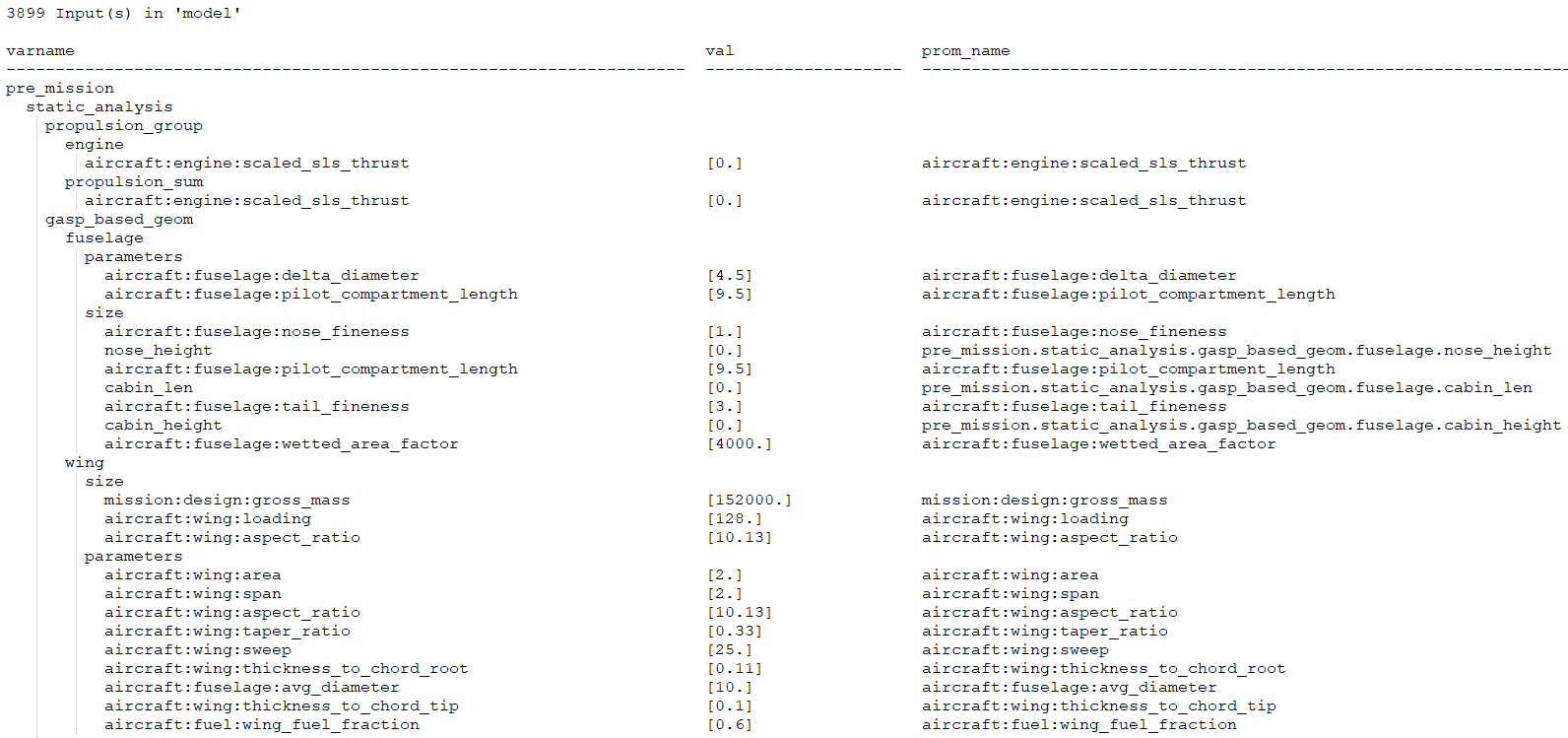
In this screenshot, we see a tree structure. There are three columns. The left column is a list of variable names. The middle column is the value and the right column is the promoted variable name. pre_mission is a phase, static_analysis is a subgroup which contains other subcomponents (e.g. propulsion_group). engine is a component under which is a list of input variables (e.g. aircraft:engine:scaled_sls_thrust).
An input variable can appear under different phases and within different components. Note that its values can be different because its value has been updated during the computation. On the top-left corner is the total number of inputs. That number counts the duplicates because one variable can appear in different phases. Aviary variable structure are discussed in Understanding the Variable Hierarchy and Understanding the Variable Metadata.
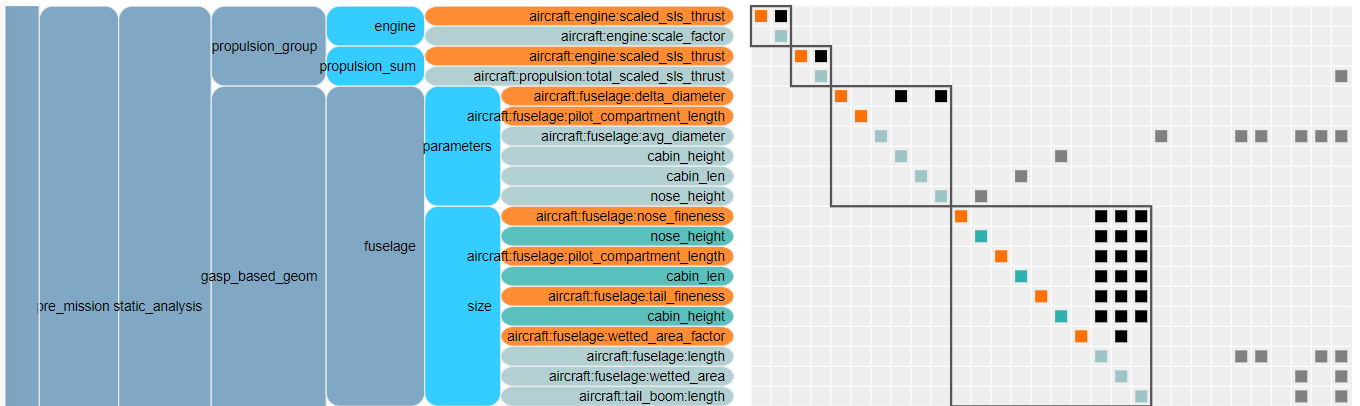
If you zoom the N2 diagram into propulsion_group and gasp_based_geom, you see the exact same tree structure:
File output_list.txt follows the same pattern. But there is another tree for implicit outputs. That helps when debugging is needed.
Additional messages#
When Aviary is run, some messages are printed on the command line and they are important. For example, the following constraint report tells us whether our desired constraints are met:
--- Constraint Report [traj] ---
--- groundroll ---
None
--- rotation ---
[final] 0.0000e+00 == normal_force [lbf]
--- ascent ---
[final] 5.0000e+02 == altitude [ft]
[path] 0.0000e+00 <= load_factor <= 1.1000e+00 [unitless]
[path] 0.0000e+00 <= fuselage_pitch <= 1.5000e+01 [deg]
--- accel ---
[final] 2.5000e+02 == EAS [kn]
--- climb1 ---
[final] 1.0000e+04 == altitude [ft]
--- climb2 ---
[final] 3.7500e+04 == altitude [ft]
[final] 1.0000e-01 <= altitude_rate [ft/min]
[final] 8.0000e-01 == mach [unitless]
--- cruise ---
None
--- desc1 ---
[final] 1.0000e+04 == altitude [ft]
--- desc2 ---
[final] 1.0000e+03 == altitude [ft]
Beyond level 1#
Aviary Level 1 is quite capable yet limited in how much is exposed to the user. If you need additional flexibility or want to add your own subsystems, you will need to move to Levels 2 or 3. Let us briefly discuss some of the possible reasons for you to move to Levels 2 or 3.
If you examine the Aviary metadata, you find that Aviary has two choices of objectives: Mission.Objectives.FUEL and Mission.Objectives.RANGE. But in level 1, you are limited to minimizing fuel. Users will be able to make other choices in level 2 and level 3.
Level 1 uses the default phase_info dictionaries, though there is an option to use a customized phase_info.
For more details, please read drawing and running simple missions.
More advanced levels of Aviary interfaces also introduce the ability to add external subsystems to the analysis. We will go into details later (see here).
No matter what mission method users choose, they can create their own phase sequences and run Aviary using either level 2 or 3 interface.
We are ready to move on to Level 2.