Two-Burn Orbit Raise#
This example demonstrates the use of a Trajectory to encapsulate a three-phase orbit raising maneuver with a burn-coast-burn phase sequence. This example is based on the problem provided in Enright [EC91].
The dynamics are given by
The initial conditions are
and the final conditions are
Building and running the problem#
The following code instantiates our problem, our trajectory, three phases, and links them accordingly. The spacecraft initial position, velocity, and acceleration magnitude are fixed. The objective is to minimize the delta-V needed to raise the spacecraft into a circular orbit at 3 Earth radii.
Note the call to link_phases which provides time, position, velocity, and delta-V continuity across all phases, and acceleration continuity between the first and second burn phases. Acceleration is 0 during the coast phase. Alternatively, we could have specified a different ODE for the coast phase, as in the example.
This example runs inconsistently with SLSQP but is solved handily by IPOPT and SNOPT.
import numpy as np
import openmdao.api as om
import dymos as dm
import matplotlib.pyplot as plt
from dymos.examples.finite_burn_orbit_raise.finite_burn_eom import FiniteBurnODE
p = om.Problem(model=om.Group())
p.driver = om.pyOptSparseDriver()
p.driver.options['optimizer'] = 'IPOPT'
p.driver.declare_coloring()
traj = dm.Trajectory()
traj.add_parameter('c', opt=False, val=1.5, units='DU/TU',
targets={'burn1': ['c'], 'coast': ['c'], 'burn2': ['c']})
# First Phase (burn)
burn1 = dm.Phase(ode_class=FiniteBurnODE,
transcription=dm.GaussLobatto(num_segments=5, order=3, compressed=False))
burn1 = traj.add_phase('burn1', burn1)
burn1.set_time_options(fix_initial=True, duration_bounds=(.5, 10), units='TU')
burn1.add_state('r', fix_initial=True, fix_final=False, defect_scaler=100.0,
rate_source='r_dot', units='DU')
burn1.add_state('theta', fix_initial=True, fix_final=False, defect_scaler=100.0,
rate_source='theta_dot', units='rad')
burn1.add_state('vr', fix_initial=True, fix_final=False, defect_scaler=100.0,
rate_source='vr_dot', units='DU/TU')
burn1.add_state('vt', fix_initial=True, fix_final=False, defect_scaler=100.0,
rate_source='vt_dot', units='DU/TU')
burn1.add_state('accel', fix_initial=True, fix_final=False,
rate_source='at_dot', units='DU/TU**2')
burn1.add_state('deltav', fix_initial=True, fix_final=False,
rate_source='deltav_dot', units='DU/TU')
burn1.add_control('u1', rate_continuity=True, rate2_continuity=True, units='deg',
scaler=0.01, rate_continuity_scaler=0.001, rate2_continuity_scaler=0.001,
lower=-30, upper=30)
# Second Phase (Coast)
coast = dm.Phase(ode_class=FiniteBurnODE,
transcription=dm.GaussLobatto(num_segments=5, order=3, compressed=False))
coast.set_time_options(initial_bounds=(0.5, 20), duration_bounds=(.5, 50), duration_ref=50,
units='TU')
coast.add_state('r', fix_initial=False, fix_final=False, defect_scaler=100.0,
rate_source='r_dot', targets=['r'], units='DU')
coast.add_state('theta', fix_initial=False, fix_final=False, defect_scaler=100.0,
rate_source='theta_dot', targets=['theta'], units='rad')
coast.add_state('vr', fix_initial=False, fix_final=False, defect_scaler=100.0,
rate_source='vr_dot', targets=['vr'], units='DU/TU')
coast.add_state('vt', fix_initial=False, fix_final=False, defect_scaler=100.0,
rate_source='vt_dot', targets=['vt'], units='DU/TU')
coast.add_state('accel', fix_initial=True, fix_final=True,
rate_source='at_dot', targets=['accel'], units='DU/TU**2')
coast.add_state('deltav', fix_initial=False, fix_final=False,
rate_source='deltav_dot', units='DU/TU')
coast.add_parameter('u1', opt=False, val=0.0, units='deg', targets=['u1'])
# Third Phase (burn)
burn2 = dm.Phase(ode_class=FiniteBurnODE,
transcription=dm.GaussLobatto(num_segments=5, order=3, compressed=False))
traj.add_phase('coast', coast)
traj.add_phase('burn2', burn2)
burn2.set_time_options(initial_bounds=(0.5, 50), duration_bounds=(.5, 10), initial_ref=10,
units='TU')
burn2.add_state('r', fix_initial=False, fix_final=True, defect_scaler=100.0,
rate_source='r_dot', units='DU')
burn2.add_state('theta', fix_initial=False, fix_final=False, defect_scaler=100.0,
rate_source='theta_dot', units='rad')
burn2.add_state('vr', fix_initial=False, fix_final=True, defect_scaler=1000.0,
rate_source='vr_dot', units='DU/TU')
burn2.add_state('vt', fix_initial=False, fix_final=True, defect_scaler=1000.0,
rate_source='vt_dot', units='DU/TU')
burn2.add_state('accel', fix_initial=False, fix_final=False, defect_scaler=1.0,
rate_source='at_dot', units='DU/TU**2')
burn2.add_state('deltav', fix_initial=False, fix_final=False, defect_scaler=1.0,
rate_source='deltav_dot', units='DU/TU')
burn2.add_objective('deltav', loc='final', scaler=100.0)
burn2.add_control('u1', rate_continuity=True, rate2_continuity=True, units='deg',
scaler=0.01, lower=-90, upper=90)
burn1.add_timeseries_output('pos_x')
coast.add_timeseries_output('pos_x')
burn2.add_timeseries_output('pos_x')
burn1.add_timeseries_output('pos_y')
coast.add_timeseries_output('pos_y')
burn2.add_timeseries_output('pos_y')
# Link Phases
traj.link_phases(phases=['burn1', 'coast', 'burn2'],
vars=['time', 'r', 'theta', 'vr', 'vt', 'deltav'])
traj.link_phases(phases=['burn1', 'burn2'], vars=['accel'])
p.model.add_subsystem('traj', subsys=traj)
# Finish Problem Setup
p.setup(check=True)
# Set Initial Guesses
p.set_val('traj.parameters:c', val=1.5, units='DU/TU')
burn1 = p.model.traj.phases.burn1
burn2 = p.model.traj.phases.burn2
coast = p.model.traj.phases.coast
burn1.set_time_val(initial=0.0, duration=2.25)
burn1.set_state_val('r', [1, 1.5])
burn1.set_state_val('theta', [0, 1.7])
burn1.set_state_val('vr', [0, 0])
burn1.set_state_val('vt', [1, 1])
burn1.set_state_val('accel', [0.1, 0.0])
burn1.set_state_val('deltav', [0, 0.1])
burn1.set_control_val('u1', [-3.5, 13.0])
coast.set_time_val(initial=2.25, duration=3.0)
coast.set_state_val('r', [1.3, 1.5])
coast.set_state_val('theta', [2.1767, 1.7])
coast.set_state_val('vr', [0.3285, 0])
coast.set_state_val('vt', [0.97, 1])
coast.set_state_val('accel', [0, 0])
burn2.set_time_val(initial=5.25, duration=1.75)
burn2.set_state_val('r', [1, 3])
burn2.set_state_val('theta', [0, 4])
burn2.set_state_val('vr', [0, 0])
burn2.set_state_val('vt', [1, np.sqrt(1 / 3)])
burn2.set_state_val('accel', [0.1, 0.0])
burn2.set_state_val('deltav', [0.1, 0.2])
burn2.set_control_val('u1', [0, 0])
dm.run_problem(p, simulate=True)
INFO: checking out_of_order...
INFO: out_of_order check complete (0.001292 sec).
INFO: checking system...
INFO: system check complete (0.000043 sec).
INFO: checking solvers...
INFO: solvers check complete (0.000311 sec).
INFO: checking dup_inputs...
INFO: dup_inputs check complete (0.000456 sec).
INFO: checking missing_recorders...
INFO: missing_recorders check complete (0.000002 sec).
INFO: checking unserializable_options...
INFO: unserializable_options check complete (0.003698 sec).
INFO: checking comp_has_no_outputs...
INFO: comp_has_no_outputs check complete (0.000101 sec).
INFO: checking auto_ivc_warnings...
INFO: auto_ivc_warnings check complete (0.000003 sec).
Jacobian shape: (112, 204) (3.64% nonzero)
FWD solves: 13 REV solves: 0
Total colors vs. total size: 13 vs 204 (93.63% improvement)
Sparsity computed using tolerance: 1e-25.
Dense total jacobian for Problem 'problem' was computed 3 times.
Time to compute sparsity: 0.2996 sec
Time to compute coloring: 0.1018 sec
Memory to compute coloring: 0.2578 MB
Coloring created on: 2026-05-13 14:56:57
Optimization Problem -- Optimization using pyOpt_sparse
================================================================================
Objective Function: _objfunc
Solution:
--------------------------------------------------------------------------------
Total Time: 1.6798
User Objective Time : 0.1048
User Sensitivity Time : 1.2276
Interface Time : 0.1382
Opt Solver Time: 0.2092
Calls to Objective Function : 28
Calls to Sens Function : 28
Objectives
Index Name Value
0 traj.burn2.states:deltav 3.989839E+01
Variables (c - continuous, i - integer, d - discrete)
Index Name Type Lower Bound Value Upper Bound Status
0 traj.burn1.t_duration_0 c 5.000000E-01 2.228030E+00 1.000000E+01
1 traj.burn1.states:r_0 c -1.000000E+30 1.002411E+00 1.000000E+30
2 traj.burn1.states:r_1 c -1.000000E+30 1.002411E+00 1.000000E+30
3 traj.burn1.states:r_2 c -1.000000E+30 1.021674E+00 1.000000E+30
4 traj.burn1.states:r_3 c -1.000000E+30 1.021674E+00 1.000000E+30
5 traj.burn1.states:r_4 c -1.000000E+30 1.072668E+00 1.000000E+30
6 traj.burn1.states:r_5 c -1.000000E+30 1.072668E+00 1.000000E+30
7 traj.burn1.states:r_6 c -1.000000E+30 1.162426E+00 1.000000E+30
8 traj.burn1.states:r_7 c -1.000000E+30 1.162426E+00 1.000000E+30
9 traj.burn1.states:r_8 c -1.000000E+30 1.289870E+00 1.000000E+30
10 traj.burn1.states:theta_0 c -1.000000E+30 4.551154E-01 1.000000E+30
11 traj.burn1.states:theta_1 c -1.000000E+30 4.551154E-01 1.000000E+30
12 traj.burn1.states:theta_2 c -1.000000E+30 9.219251E-01 1.000000E+30
13 traj.burn1.states:theta_3 c -1.000000E+30 9.219251E-01 1.000000E+30
14 traj.burn1.states:theta_4 c -1.000000E+30 1.378635E+00 1.000000E+30
15 traj.burn1.states:theta_5 c -1.000000E+30 1.378635E+00 1.000000E+30
16 traj.burn1.states:theta_6 c -1.000000E+30 1.798766E+00 1.000000E+30
17 traj.burn1.states:theta_7 c -1.000000E+30 1.798766E+00 1.000000E+30
18 traj.burn1.states:theta_8 c -1.000000E+30 2.165052E+00 1.000000E+30
19 traj.burn1.states:vr_0 c -1.000000E+30 1.772243E-02 1.000000E+30
20 traj.burn1.states:vr_1 c -1.000000E+30 1.772243E-02 1.000000E+30
21 traj.burn1.states:vr_2 c -1.000000E+30 7.447792E-02 1.000000E+30
22 traj.burn1.states:vr_3 c -1.000000E+30 7.447792E-02 1.000000E+30
23 traj.burn1.states:vr_4 c -1.000000E+30 1.570336E-01 1.000000E+30
24 traj.burn1.states:vr_5 c -1.000000E+30 1.570336E-01 1.000000E+30
25 traj.burn1.states:vr_6 c -1.000000E+30 2.452608E-01 1.000000E+30
26 traj.burn1.states:vr_7 c -1.000000E+30 2.452608E-01 1.000000E+30
27 traj.burn1.states:vr_8 c -1.000000E+30 3.247035E-01 1.000000E+30
28 traj.burn1.states:vt_0 c -1.000000E+30 1.042686E+00 1.000000E+30
29 traj.burn1.states:vt_1 c -1.000000E+30 1.042686E+00 1.000000E+30
30 traj.burn1.states:vt_2 c -1.000000E+30 1.069132E+00 1.000000E+30
31 traj.burn1.states:vt_3 c -1.000000E+30 1.069132E+00 1.000000E+30
32 traj.burn1.states:vt_4 c -1.000000E+30 1.065074E+00 1.000000E+30
33 traj.burn1.states:vt_5 c -1.000000E+30 1.065074E+00 1.000000E+30
34 traj.burn1.states:vt_6 c -1.000000E+30 1.030094E+00 1.000000E+30
35 traj.burn1.states:vt_7 c -1.000000E+30 1.030094E+00 1.000000E+30
36 traj.burn1.states:vt_8 c -1.000000E+30 9.761629E-01 1.000000E+30
37 traj.burn1.states:accel_0 c -1.000000E+30 1.030617E-01 1.000000E+30
38 traj.burn1.states:accel_1 c -1.000000E+30 1.030617E-01 1.000000E+30
39 traj.burn1.states:accel_2 c -1.000000E+30 1.063167E-01 1.000000E+30
40 traj.burn1.states:accel_3 c -1.000000E+30 1.063167E-01 1.000000E+30
41 traj.burn1.states:accel_4 c -1.000000E+30 1.097841E-01 1.000000E+30
42 traj.burn1.states:accel_5 c -1.000000E+30 1.097841E-01 1.000000E+30
43 traj.burn1.states:accel_6 c -1.000000E+30 1.134853E-01 1.000000E+30
44 traj.burn1.states:accel_7 c -1.000000E+30 1.134853E-01 1.000000E+30
45 traj.burn1.states:accel_8 c -1.000000E+30 1.174447E-01 1.000000E+30
46 traj.burn1.states:deltav_0 c -1.000000E+30 4.523589E-02 1.000000E+30
47 traj.burn1.states:deltav_1 c -1.000000E+30 4.523589E-02 1.000000E+30
48 traj.burn1.states:deltav_2 c -1.000000E+30 9.187850E-02 1.000000E+30
49 traj.burn1.states:deltav_3 c -1.000000E+30 9.187850E-02 1.000000E+30
50 traj.burn1.states:deltav_4 c -1.000000E+30 1.400181E-01 1.000000E+30
51 traj.burn1.states:deltav_5 c -1.000000E+30 1.400181E-01 1.000000E+30
52 traj.burn1.states:deltav_6 c -1.000000E+30 1.897541E-01 1.000000E+30
53 traj.burn1.states:deltav_7 c -1.000000E+30 1.897541E-01 1.000000E+30
54 traj.burn1.states:deltav_8 c -1.000000E+30 2.411959E-01 1.000000E+30
55 traj.burn1.controls:u1_0 c -3.000000E-01 -3.871082E-02 3.000000E-01
56 traj.burn1.controls:u1_1 c -3.000000E-01 -2.977418E-02 3.000000E-01
57 traj.burn1.controls:u1_2 c -3.000000E-01 -1.798095E-02 3.000000E-01
58 traj.burn1.controls:u1_3 c -3.000000E-01 -1.798095E-02 3.000000E-01
59 traj.burn1.controls:u1_4 c -3.000000E-01 -3.205161E-03 3.000000E-01
60 traj.burn1.controls:u1_5 c -3.000000E-01 1.467911E-02 3.000000E-01
61 traj.burn1.controls:u1_6 c -3.000000E-01 1.467911E-02 3.000000E-01
62 traj.burn1.controls:u1_7 c -3.000000E-01 3.450564E-02 3.000000E-01
63 traj.burn1.controls:u1_8 c -3.000000E-01 5.510823E-02 3.000000E-01
64 traj.burn1.controls:u1_9 c -3.000000E-01 5.510823E-02 3.000000E-01
65 traj.burn1.controls:u1_10 c -3.000000E-01 7.549970E-02 3.000000E-01
66 traj.burn1.controls:u1_11 c -3.000000E-01 9.469292E-02 3.000000E-01
67 traj.burn1.controls:u1_12 c -3.000000E-01 9.469292E-02 3.000000E-01
68 traj.burn1.controls:u1_13 c -3.000000E-01 1.125798E-01 3.000000E-01
69 traj.burn1.controls:u1_14 c -3.000000E-01 1.290522E-01 3.000000E-01
70 traj.burn2.t_initial_0 c 5.000000E-02 9.614472E-01 5.000000E+00
71 traj.burn2.t_duration_0 c 5.000000E-01 1.275260E+00 1.000000E+01
72 traj.burn2.states:r_0 c -1.000000E+30 2.985662E+00 1.000000E+30
73 traj.burn2.states:r_1 c -1.000000E+30 2.992648E+00 1.000000E+30
74 traj.burn2.states:r_2 c -1.000000E+30 2.992648E+00 1.000000E+30
75 traj.burn2.states:r_3 c -1.000000E+30 2.996948E+00 1.000000E+30
76 traj.burn2.states:r_4 c -1.000000E+30 2.996948E+00 1.000000E+30
77 traj.burn2.states:r_5 c -1.000000E+30 2.999153E+00 1.000000E+30
78 traj.burn2.states:r_6 c -1.000000E+30 2.999153E+00 1.000000E+30
79 traj.burn2.states:r_7 c -1.000000E+30 2.999922E+00 1.000000E+30
80 traj.burn2.states:r_8 c -1.000000E+30 2.999922E+00 1.000000E+30
81 traj.burn2.states:theta_0 c -1.000000E+30 4.156692E+00 1.000000E+30
82 traj.burn2.states:theta_1 c -1.000000E+30 4.193917E+00 1.000000E+30
83 traj.burn2.states:theta_2 c -1.000000E+30 4.193917E+00 1.000000E+30
84 traj.burn2.states:theta_3 c -1.000000E+30 4.233604E+00 1.000000E+30
85 traj.burn2.states:theta_4 c -1.000000E+30 4.233604E+00 1.000000E+30
86 traj.burn2.states:theta_5 c -1.000000E+30 4.275859E+00 1.000000E+30
87 traj.burn2.states:theta_6 c -1.000000E+30 4.275859E+00 1.000000E+30
88 traj.burn2.states:theta_7 c -1.000000E+30 4.320784E+00 1.000000E+30
89 traj.burn2.states:theta_8 c -1.000000E+30 4.320784E+00 1.000000E+30
90 traj.burn2.states:theta_9 c -1.000000E+30 4.368465E+00 1.000000E+30
91 traj.burn2.states:vr_0 c -1.000000E+30 3.335965E-02 1.000000E+30
92 traj.burn2.states:vr_1 c -1.000000E+30 2.176356E-02 1.000000E+30
93 traj.burn2.states:vr_2 c -1.000000E+30 2.176356E-02 1.000000E+30
94 traj.burn2.states:vr_3 c -1.000000E+30 1.234448E-02 1.000000E+30
95 traj.burn2.states:vr_4 c -1.000000E+30 1.234448E-02 1.000000E+30
96 traj.burn2.states:vr_5 c -1.000000E+30 5.372873E-03 1.000000E+30
97 traj.burn2.states:vr_6 c -1.000000E+30 5.372873E-03 1.000000E+30
98 traj.burn2.states:vr_7 c -1.000000E+30 1.148444E-03 1.000000E+30
99 traj.burn2.states:vr_8 c -1.000000E+30 1.148444E-03 1.000000E+30
100 traj.burn2.states:vt_0 c -1.000000E+30 4.217795E-01 1.000000E+30
101 traj.burn2.states:vt_1 c -1.000000E+30 4.510118E-01 1.000000E+30
102 traj.burn2.states:vt_2 c -1.000000E+30 4.510118E-01 1.000000E+30
103 traj.burn2.states:vt_3 c -1.000000E+30 4.812208E-01 1.000000E+30
104 traj.burn2.states:vt_4 c -1.000000E+30 4.812208E-01 1.000000E+30
105 traj.burn2.states:vt_5 c -1.000000E+30 5.123842E-01 1.000000E+30
106 traj.burn2.states:vt_6 c -1.000000E+30 5.123842E-01 1.000000E+30
107 traj.burn2.states:vt_7 c -1.000000E+30 5.444541E-01 1.000000E+30
108 traj.burn2.states:vt_8 c -1.000000E+30 5.444541E-01 1.000000E+30
109 traj.burn2.states:accel_0 c -1.000000E+30 1.174447E-01 1.000000E+30
110 traj.burn2.states:accel_1 c -1.000000E+30 1.198378E-01 1.000000E+30
111 traj.burn2.states:accel_2 c -1.000000E+30 1.198378E-01 1.000000E+30
112 traj.burn2.states:accel_3 c -1.000000E+30 1.223305E-01 1.000000E+30
113 traj.burn2.states:accel_4 c -1.000000E+30 1.223305E-01 1.000000E+30
114 traj.burn2.states:accel_5 c -1.000000E+30 1.249291E-01 1.000000E+30
115 traj.burn2.states:accel_6 c -1.000000E+30 1.249291E-01 1.000000E+30
116 traj.burn2.states:accel_7 c -1.000000E+30 1.276404E-01 1.000000E+30
117 traj.burn2.states:accel_8 c -1.000000E+30 1.276404E-01 1.000000E+30
118 traj.burn2.states:accel_9 c -1.000000E+30 1.304721E-01 1.000000E+30
119 traj.burn2.states:deltav_0 c -1.000000E+30 2.411959E-01 1.000000E+30
120 traj.burn2.states:deltav_1 c -1.000000E+30 2.714535E-01 1.000000E+30
121 traj.burn2.states:deltav_2 c -1.000000E+30 2.714535E-01 1.000000E+30
122 traj.burn2.states:deltav_3 c -1.000000E+30 3.023341E-01 1.000000E+30
123 traj.burn2.states:deltav_4 c -1.000000E+30 3.023341E-01 1.000000E+30
124 traj.burn2.states:deltav_5 c -1.000000E+30 3.338638E-01 1.000000E+30
125 traj.burn2.states:deltav_6 c -1.000000E+30 3.338638E-01 1.000000E+30
126 traj.burn2.states:deltav_7 c -1.000000E+30 3.660705E-01 1.000000E+30
127 traj.burn2.states:deltav_8 c -1.000000E+30 3.660705E-01 1.000000E+30
128 traj.burn2.states:deltav_9 c -1.000000E+30 3.989839E-01 1.000000E+30
129 traj.burn2.controls:u1_0 c -9.000000E-01 1.545347E-02 9.000000E-01
130 traj.burn2.controls:u1_1 c -9.000000E-01 1.315257E-02 9.000000E-01
131 traj.burn2.controls:u1_2 c -9.000000E-01 1.113035E-02 9.000000E-01
132 traj.burn2.controls:u1_3 c -9.000000E-01 1.113035E-02 9.000000E-01
133 traj.burn2.controls:u1_4 c -9.000000E-01 9.453512E-03 9.000000E-01
134 traj.burn2.controls:u1_5 c -9.000000E-01 8.188743E-03 9.000000E-01
135 traj.burn2.controls:u1_6 c -9.000000E-01 8.188743E-03 9.000000E-01
136 traj.burn2.controls:u1_7 c -9.000000E-01 7.310470E-03 9.000000E-01
137 traj.burn2.controls:u1_8 c -9.000000E-01 6.793120E-03 9.000000E-01
138 traj.burn2.controls:u1_9 c -9.000000E-01 6.793120E-03 9.000000E-01
139 traj.burn2.controls:u1_10 c -9.000000E-01 6.670239E-03 9.000000E-01
140 traj.burn2.controls:u1_11 c -9.000000E-01 6.975374E-03 9.000000E-01
141 traj.burn2.controls:u1_12 c -9.000000E-01 6.975374E-03 9.000000E-01
142 traj.burn2.controls:u1_13 c -9.000000E-01 7.640932E-03 9.000000E-01
143 traj.burn2.controls:u1_14 c -9.000000E-01 8.599319E-03 9.000000E-01
144 traj.coast.t_initial_0 c 5.000000E-01 2.228030E+00 2.000000E+01
145 traj.coast.t_duration_0 c 1.000000E-02 1.477288E-01 1.000000E+00
146 traj.coast.states:r_0 c -1.000000E+30 1.289870E+00 1.000000E+30
147 traj.coast.states:r_1 c -1.000000E+30 1.826968E+00 1.000000E+30
148 traj.coast.states:r_2 c -1.000000E+30 1.826968E+00 1.000000E+30
149 traj.coast.states:r_3 c -1.000000E+30 2.302606E+00 1.000000E+30
150 traj.coast.states:r_4 c -1.000000E+30 2.302606E+00 1.000000E+30
151 traj.coast.states:r_5 c -1.000000E+30 2.652890E+00 1.000000E+30
152 traj.coast.states:r_6 c -1.000000E+30 2.652890E+00 1.000000E+30
153 traj.coast.states:r_7 c -1.000000E+30 2.878553E+00 1.000000E+30
154 traj.coast.states:r_8 c -1.000000E+30 2.878553E+00 1.000000E+30
155 traj.coast.states:r_9 c -1.000000E+30 2.985662E+00 1.000000E+30
156 traj.coast.states:theta_0 c -1.000000E+30 2.165052E+00 1.000000E+30
157 traj.coast.states:theta_1 c -1.000000E+30 2.959738E+00 1.000000E+30
158 traj.coast.states:theta_2 c -1.000000E+30 2.959738E+00 1.000000E+30
159 traj.coast.states:theta_3 c -1.000000E+30 3.397868E+00 1.000000E+30
160 traj.coast.states:theta_4 c -1.000000E+30 3.397868E+00 1.000000E+30
161 traj.coast.states:theta_5 c -1.000000E+30 3.699817E+00 1.000000E+30
162 traj.coast.states:theta_6 c -1.000000E+30 3.699817E+00 1.000000E+30
163 traj.coast.states:theta_7 c -1.000000E+30 3.941656E+00 1.000000E+30
164 traj.coast.states:theta_8 c -1.000000E+30 3.941656E+00 1.000000E+30
165 traj.coast.states:theta_9 c -1.000000E+30 4.156692E+00 1.000000E+30
166 traj.coast.states:vr_0 c -1.000000E+30 3.247035E-01 1.000000E+30
167 traj.coast.states:vr_1 c -1.000000E+30 3.587987E-01 1.000000E+30
168 traj.coast.states:vr_2 c -1.000000E+30 3.587987E-01 1.000000E+30
169 traj.coast.states:vr_3 c -1.000000E+30 2.804133E-01 1.000000E+30
170 traj.coast.states:vr_4 c -1.000000E+30 2.804133E-01 1.000000E+30
171 traj.coast.states:vr_5 c -1.000000E+30 1.941954E-01 1.000000E+30
172 traj.coast.states:vr_6 c -1.000000E+30 1.941954E-01 1.000000E+30
173 traj.coast.states:vr_7 c -1.000000E+30 1.120415E-01 1.000000E+30
174 traj.coast.states:vr_8 c -1.000000E+30 1.120415E-01 1.000000E+30
175 traj.coast.states:vr_9 c -1.000000E+30 3.335965E-02 1.000000E+30
176 traj.coast.states:vt_0 c -1.000000E+30 9.761629E-01 1.000000E+30
177 traj.coast.states:vt_1 c -1.000000E+30 6.893012E-01 1.000000E+30
178 traj.coast.states:vt_2 c -1.000000E+30 6.893012E-01 1.000000E+30
179 traj.coast.states:vt_3 c -1.000000E+30 5.469078E-01 1.000000E+30
180 traj.coast.states:vt_4 c -1.000000E+30 5.469078E-01 1.000000E+30
181 traj.coast.states:vt_5 c -1.000000E+30 4.746893E-01 1.000000E+30
182 traj.coast.states:vt_6 c -1.000000E+30 4.746893E-01 1.000000E+30
183 traj.coast.states:vt_7 c -1.000000E+30 4.374743E-01 1.000000E+30
184 traj.coast.states:vt_8 c -1.000000E+30 4.374743E-01 1.000000E+30
185 traj.coast.states:vt_9 c -1.000000E+30 4.217795E-01 1.000000E+30
186 traj.coast.states:accel_0 c -1.000000E+30 7.621647E-19 1.000000E+30
187 traj.coast.states:accel_1 c -1.000000E+30 1.118668E-18 1.000000E+30
188 traj.coast.states:accel_2 c -1.000000E+30 1.533293E-18 1.000000E+30
189 traj.coast.states:accel_3 c -1.000000E+30 1.635777E-18 1.000000E+30
190 traj.coast.states:accel_4 c -1.000000E+30 1.587960E-18 1.000000E+30
191 traj.coast.states:accel_5 c -1.000000E+30 1.439765E-18 1.000000E+30
192 traj.coast.states:accel_6 c -1.000000E+30 1.001430E-18 1.000000E+30
193 traj.coast.states:accel_7 c -1.000000E+30 6.720185E-19 1.000000E+30
194 traj.coast.states:deltav_0 c -1.000000E+30 2.411959E-01 1.000000E+30
195 traj.coast.states:deltav_1 c -1.000000E+30 2.411959E-01 1.000000E+30
196 traj.coast.states:deltav_2 c -1.000000E+30 2.411959E-01 1.000000E+30
197 traj.coast.states:deltav_3 c -1.000000E+30 2.411959E-01 1.000000E+30
198 traj.coast.states:deltav_4 c -1.000000E+30 2.411959E-01 1.000000E+30
199 traj.coast.states:deltav_5 c -1.000000E+30 2.411959E-01 1.000000E+30
200 traj.coast.states:deltav_6 c -1.000000E+30 2.411959E-01 1.000000E+30
201 traj.coast.states:deltav_7 c -1.000000E+30 2.411959E-01 1.000000E+30
202 traj.coast.states:deltav_8 c -1.000000E+30 2.411959E-01 1.000000E+30
203 traj.coast.states:deltav_9 c -1.000000E+30 2.411959E-01 1.000000E+30
Constraints (i - inequality, e - equality)
Index Name Type Lower Value Upper Status Lagrange Multiplier
0 traj.linkages.burn1:time_final|coast:time_initial e 0.000000E+00 0.000000E+00 0.000000E+00 1.28028E-11
1 traj.linkages.burn1:r_final|coast:r_initial e 0.000000E+00 0.000000E+00 0.000000E+00 -6.46260E+01
2 traj.linkages.burn1:theta_final|coast:theta_initial e 0.000000E+00 0.000000E+00 0.000000E+00 -1.29770E-09
3 traj.linkages.burn1:vr_final|coast:vr_initial e 0.000000E+00 0.000000E+00 0.000000E+00 -2.24803E+01
4 traj.linkages.burn1:vt_final|coast:vt_initial e 0.000000E+00 0.000000E+00 0.000000E+00 -9.84946E+01
5 traj.linkages.burn1:deltav_final|coast:deltav_initial e 0.000000E+00 0.000000E+00 0.000000E+00 1.00000E+02
6 traj.linkages.coast:time_final|burn2:time_initial e 0.000000E+00 0.000000E+00 0.000000E+00 -8.18534E-12
7 traj.linkages.coast:r_final|burn2:r_initial e 0.000000E+00 0.000000E+00 0.000000E+00 -1.76856E+01
8 traj.linkages.coast:theta_final|burn2:theta_initial e 0.000000E+00 0.000000E+00 0.000000E+00 -7.93885E-10
9 traj.linkages.coast:vr_final|burn2:vr_initial e 0.000000E+00 0.000000E+00 0.000000E+00 -2.71580E+00
10 traj.linkages.coast:vt_final|burn2:vt_initial e 0.000000E+00 0.000000E+00 0.000000E+00 -1.00155E+02
11 traj.linkages.coast:deltav_final|burn2:deltav_initial e 0.000000E+00 0.000000E+00 0.000000E+00 1.00000E+02
12 traj.linkages.burn1:accel_final|burn2:accel_initial e 0.000000E+00 0.000000E+00 0.000000E+00 -2.53581E-01
13 traj.burn1.collocation_constraint.defects:r e 0.000000E+00 2.821462E-15 0.000000E+00 1.28817E+00
14 traj.burn1.collocation_constraint.defects:r e 0.000000E+00 2.009808E-15 0.000000E+00 1.29152E+00
15 traj.burn1.collocation_constraint.defects:r e 0.000000E+00 -6.184026E-16 0.000000E+00 1.23041E+00
16 traj.burn1.collocation_constraint.defects:r e 0.000000E+00 -3.092013E-15 0.000000E+00 1.10376E+00
17 traj.burn1.collocation_constraint.defects:r e 0.000000E+00 -7.420831E-15 0.000000E+00 9.43352E-01
18 traj.burn1.collocation_constraint.defects:theta e 0.000000E+00 -4.947221E-15 0.000000E+00 1.81848E-11
19 traj.burn1.collocation_constraint.defects:theta e 0.000000E+00 -4.947221E-15 0.000000E+00 1.82514E-11
20 traj.burn1.collocation_constraint.defects:theta e 0.000000E+00 -4.947221E-15 0.000000E+00 1.80818E-11
21 traj.burn1.collocation_constraint.defects:theta e 0.000000E+00 -1.236805E-14 0.000000E+00 1.77797E-11
22 traj.burn1.collocation_constraint.defects:theta e 0.000000E+00 3.215693E-14 0.000000E+00 1.73777E-11
23 traj.burn1.collocation_constraint.defects:vr e 0.000000E+00 -1.004904E-14 0.000000E+00 -6.92120E-02
24 traj.burn1.collocation_constraint.defects:vr e 0.000000E+00 4.947221E-15 0.000000E+00 -6.34585E-03
25 traj.burn1.collocation_constraint.defects:vr e 0.000000E+00 -1.298645E-14 0.000000E+00 8.57711E-02
26 traj.burn1.collocation_constraint.defects:vr e 0.000000E+00 -1.422326E-14 0.000000E+00 1.83634E-01
27 traj.burn1.collocation_constraint.defects:vr e 0.000000E+00 4.328818E-15 0.000000E+00 2.66192E-01
28 traj.burn1.collocation_constraint.defects:vt e 0.000000E+00 -6.493227E-15 0.000000E+00 1.35529E+00
29 traj.burn1.collocation_constraint.defects:vt e 0.000000E+00 1.113125E-14 0.000000E+00 1.40601E+00
30 traj.burn1.collocation_constraint.defects:vt e 0.000000E+00 -7.343531E-16 0.000000E+00 1.41796E+00
31 traj.burn1.collocation_constraint.defects:vt e 0.000000E+00 1.144045E-14 0.000000E+00 1.39112E+00
32 traj.burn1.collocation_constraint.defects:vt e 0.000000E+00 -8.348435E-15 0.000000E+00 1.34093E+00
33 traj.burn1.collocation_constraint.defects:accel e 0.000000E+00 -1.198155E-17 0.000000E+00 1.48289E+01
34 traj.burn1.collocation_constraint.defects:accel e 0.000000E+00 1.178830E-17 0.000000E+00 1.17352E+01
35 traj.burn1.collocation_constraint.defects:accel e 0.000000E+00 1.932508E-19 0.000000E+00 7.42535E+00
36 traj.burn1.collocation_constraint.defects:accel e 0.000000E+00 -1.546006E-17 0.000000E+00 3.46704E+00
37 traj.burn1.collocation_constraint.defects:accel e 0.000000E+00 2.319010E-17 0.000000E+00 9.70278E-01
38 traj.burn1.collocation_constraint.defects:deltav e 0.000000E+00 0.000000E+00 0.000000E+00 -1.33333E+02
39 traj.burn1.collocation_constraint.defects:deltav e 0.000000E+00 3.092013E-18 0.000000E+00 -1.33333E+02
40 traj.burn1.collocation_constraint.defects:deltav e 0.000000E+00 -3.092013E-18 0.000000E+00 -1.33333E+02
41 traj.burn1.collocation_constraint.defects:deltav e 0.000000E+00 0.000000E+00 0.000000E+00 -1.33333E+02
42 traj.burn1.collocation_constraint.defects:deltav e 0.000000E+00 1.546006E-17 0.000000E+00 -1.33333E+02
43 traj.burn1.continuity_comp.defect_states:r e 0.000000E+00 0.000000E+00 0.000000E+00 9.73892E+01
44 traj.burn1.continuity_comp.defect_states:r e 0.000000E+00 0.000000E+00 0.000000E+00 9.54877E+01
45 traj.burn1.continuity_comp.defect_states:r e 0.000000E+00 0.000000E+00 0.000000E+00 8.82063E+01
46 traj.burn1.continuity_comp.defect_states:r e 0.000000E+00 0.000000E+00 0.000000E+00 7.69316E+01
47 traj.burn1.continuity_comp.defect_states:theta e 0.000000E+00 0.000000E+00 0.000000E+00 1.36636E-09
48 traj.burn1.continuity_comp.defect_states:theta e 0.000000E+00 0.000000E+00 0.000000E+00 1.36249E-09
49 traj.burn1.continuity_comp.defect_states:theta e 0.000000E+00 0.000000E+00 0.000000E+00 1.34481E-09
50 traj.burn1.continuity_comp.defect_states:theta e 0.000000E+00 0.000000E+00 0.000000E+00 1.31840E-09
51 traj.burn1.continuity_comp.defect_states:vr e 0.000000E+00 0.000000E+00 0.000000E+00 -3.32087E+00
52 traj.burn1.continuity_comp.defect_states:vr e 0.000000E+00 0.000000E+00 0.000000E+00 2.74187E+00
53 traj.burn1.continuity_comp.defect_states:vr e 0.000000E+00 0.000000E+00 0.000000E+00 1.01921E+01
54 traj.burn1.continuity_comp.defect_states:vr e 0.000000E+00 0.000000E+00 0.000000E+00 1.71505E+01
55 traj.burn1.continuity_comp.defect_states:vt e 0.000000E+00 0.000000E+00 0.000000E+00 1.03967E+02
56 traj.burn1.continuity_comp.defect_states:vt e 0.000000E+00 0.000000E+00 0.000000E+00 1.06421E+02
57 traj.burn1.continuity_comp.defect_states:vt e 0.000000E+00 0.000000E+00 0.000000E+00 1.05753E+02
58 traj.burn1.continuity_comp.defect_states:vt e 0.000000E+00 0.000000E+00 0.000000E+00 1.02612E+02
59 traj.burn1.continuity_comp.defect_states:accel e 0.000000E+00 0.000000E+00 0.000000E+00 1.02191E+01
60 traj.burn1.continuity_comp.defect_states:accel e 0.000000E+00 0.000000E+00 0.000000E+00 7.23618E+00
61 traj.burn1.continuity_comp.defect_states:accel e 0.000000E+00 0.000000E+00 0.000000E+00 3.95428E+00
62 traj.burn1.continuity_comp.defect_states:accel e 0.000000E+00 0.000000E+00 0.000000E+00 1.43810E+00
63 traj.burn1.continuity_comp.defect_states:deltav e 0.000000E+00 0.000000E+00 0.000000E+00 -1.00000E+02
64 traj.burn1.continuity_comp.defect_states:deltav e 0.000000E+00 0.000000E+00 0.000000E+00 -1.00000E+02
65 traj.burn1.continuity_comp.defect_states:deltav e 0.000000E+00 0.000000E+00 0.000000E+00 -1.00000E+02
66 traj.burn1.continuity_comp.defect_states:deltav e 0.000000E+00 0.000000E+00 0.000000E+00 -1.00000E+02
67 traj.burn1.continuity_comp.defect_control_rates:u1_rate e 0.000000E+00 -6.926109E-18 0.000000E+00 5.04690E-03
68 traj.burn1.continuity_comp.defect_control_rates:u1_rate e 0.000000E+00 -5.936665E-18 0.000000E+00 1.13756E-03
69 traj.burn1.continuity_comp.defect_control_rates:u1_rate e 0.000000E+00 -1.187333E-17 0.000000E+00 6.27073E-06
70 traj.burn1.continuity_comp.defect_control_rates:u1_rate e 0.000000E+00 1.187333E-17 0.000000E+00 -3.21095E-03
71 traj.burn1.continuity_comp.defect_controls:u1 e 0.000000E+00 0.000000E+00 0.000000E+00 2.73331E-06
72 traj.burn1.continuity_comp.defect_controls:u1 e 0.000000E+00 0.000000E+00 0.000000E+00 -3.57484E-06
73 traj.burn1.continuity_comp.defect_controls:u1 e 0.000000E+00 0.000000E+00 0.000000E+00 -1.98447E-06
74 traj.burn1.continuity_comp.defect_controls:u1 e 0.000000E+00 0.000000E+00 0.000000E+00 2.87365E-06
75 traj.burn2.collocation_constraint.defects:r e 0.000000E+00 -2.097188E-14 0.000000E+00 2.35342E-01
76 traj.burn2.collocation_constraint.defects:r e 0.000000E+00 2.429021E-14 0.000000E+00 2.34619E-01
77 traj.burn2.collocation_constraint.defects:r e 0.000000E+00 -4.085976E-14 0.000000E+00 2.34151E-01
78 traj.burn2.collocation_constraint.defects:r e 0.000000E+00 7.582395E-15 0.000000E+00 2.33858E-01
79 traj.burn2.collocation_constraint.defects:r e 0.000000E+00 1.420247E-14 0.000000E+00 2.33656E-01
80 traj.burn2.collocation_constraint.defects:theta e 0.000000E+00 4.566029E-14 0.000000E+00 9.54491E-12
81 traj.burn2.collocation_constraint.defects:theta e 0.000000E+00 -6.512785E-14 0.000000E+00 7.45563E-12
82 traj.burn2.collocation_constraint.defects:theta e 0.000000E+00 1.415823E-15 0.000000E+00 5.35138E-12
83 traj.burn2.collocation_constraint.defects:theta e 0.000000E+00 8.494937E-15 0.000000E+00 3.22618E-12
84 traj.burn2.collocation_constraint.defects:theta e 0.000000E+00 2.725459E-14 0.000000E+00 1.07670E-12
85 traj.burn2.collocation_constraint.defects:vr e 0.000000E+00 2.654668E-15 0.000000E+00 3.07736E-03
86 traj.burn2.collocation_constraint.defects:vr e 0.000000E+00 7.079114E-15 0.000000E+00 2.22200E-03
87 traj.burn2.collocation_constraint.defects:vr e 0.000000E+00 -3.982002E-15 0.000000E+00 1.71840E-03
88 traj.burn2.collocation_constraint.defects:vr e 0.000000E+00 -4.424446E-15 0.000000E+00 1.57232E-03
89 traj.burn2.collocation_constraint.defects:vr e 0.000000E+00 4.203224E-15 0.000000E+00 1.78995E-03
90 traj.burn2.collocation_constraint.defects:vt e 0.000000E+00 -1.415823E-14 0.000000E+00 1.33588E-01
91 traj.burn2.collocation_constraint.defects:vt e 0.000000E+00 5.132358E-14 0.000000E+00 1.33637E-01
92 traj.burn2.collocation_constraint.defects:vt e 0.000000E+00 -6.017247E-14 0.000000E+00 1.33621E-01
93 traj.burn2.collocation_constraint.defects:vt e 0.000000E+00 7.787026E-14 0.000000E+00 1.33544E-01
94 traj.burn2.collocation_constraint.defects:vt e 0.000000E+00 -2.123734E-14 0.000000E+00 1.33407E-01
95 traj.burn2.collocation_constraint.defects:accel e 0.000000E+00 -1.305212E-17 0.000000E+00 2.96116E-01
96 traj.burn2.collocation_constraint.defects:accel e 0.000000E+00 1.194601E-17 0.000000E+00 2.06628E-01
97 traj.burn2.collocation_constraint.defects:accel e 0.000000E+00 -7.742781E-18 0.000000E+00 1.19542E-01
98 traj.burn2.collocation_constraint.defects:accel e 0.000000E+00 -9.955004E-18 0.000000E+00 4.87446E-02
99 traj.burn2.collocation_constraint.defects:accel e 0.000000E+00 1.260967E-17 0.000000E+00 7.52728E-03
100 traj.burn2.collocation_constraint.defects:deltav e 0.000000E+00 1.769779E-18 0.000000E+00 -1.33333E+02
101 traj.burn2.collocation_constraint.defects:deltav e 0.000000E+00 -1.769779E-18 0.000000E+00 -1.33333E+02
102 traj.burn2.collocation_constraint.defects:deltav e 0.000000E+00 1.769779E-18 0.000000E+00 -1.33333E+02
103 traj.burn2.collocation_constraint.defects:deltav e 0.000000E+00 -2.477690E-17 0.000000E+00 -1.33333E+02
104 traj.burn2.collocation_constraint.defects:deltav e 0.000000E+00 -3.185601E-17 0.000000E+00 -1.33333E+02
105 traj.burn2.continuity_comp.defect_states:r e 0.000000E+00 0.000000E+00 0.000000E+00 1.76199E+01
106 traj.burn2.continuity_comp.defect_states:r e 0.000000E+00 0.000000E+00 0.000000E+00 1.75762E+01
107 traj.burn2.continuity_comp.defect_states:r e 0.000000E+00 0.000000E+00 0.000000E+00 1.75486E+01
108 traj.burn2.continuity_comp.defect_states:r e 0.000000E+00 0.000000E+00 0.000000E+00 1.75312E+01
109 traj.burn2.continuity_comp.defect_states:theta e 0.000000E+00 0.000000E+00 0.000000E+00 6.37520E-10
110 traj.burn2.continuity_comp.defect_states:theta e 0.000000E+00 0.000000E+00 0.000000E+00 4.80263E-10
111 traj.burn2.continuity_comp.defect_states:theta e 0.000000E+00 0.000000E+00 0.000000E+00 3.21659E-10
112 traj.burn2.continuity_comp.defect_states:theta e 0.000000E+00 0.000000E+00 0.000000E+00 1.61358E-10
113 traj.burn2.continuity_comp.defect_states:vr e 0.000000E+00 0.000000E+00 0.000000E+00 1.94361E+00
114 traj.burn2.continuity_comp.defect_states:vr e 0.000000E+00 0.000000E+00 0.000000E+00 1.43334E+00
115 traj.burn2.continuity_comp.defect_states:vr e 0.000000E+00 0.000000E+00 0.000000E+00 1.18894E+00
116 traj.burn2.continuity_comp.defect_states:vr e 0.000000E+00 0.000000E+00 0.000000E+00 1.21500E+00
117 traj.burn2.continuity_comp.defect_states:vt e 0.000000E+00 0.000000E+00 0.000000E+00 1.00218E+02
118 traj.burn2.continuity_comp.defect_states:vt e 0.000000E+00 0.000000E+00 0.000000E+00 1.00229E+02
119 traj.burn2.continuity_comp.defect_states:vt e 0.000000E+00 0.000000E+00 0.000000E+00 1.00194E+02
120 traj.burn2.continuity_comp.defect_states:vt e 0.000000E+00 0.000000E+00 0.000000E+00 1.00114E+02
121 traj.burn2.continuity_comp.defect_states:accel e 0.000000E+00 0.000000E+00 0.000000E+00 1.89136E-01
122 traj.burn2.continuity_comp.defect_states:accel e 0.000000E+00 0.000000E+00 0.000000E+00 1.21151E-01
123 traj.burn2.continuity_comp.defect_states:accel e 0.000000E+00 0.000000E+00 0.000000E+00 6.02455E-02
124 traj.burn2.continuity_comp.defect_states:accel e 0.000000E+00 0.000000E+00 0.000000E+00 1.66198E-02
125 traj.burn2.continuity_comp.defect_states:deltav e 0.000000E+00 0.000000E+00 0.000000E+00 -1.00000E+02
126 traj.burn2.continuity_comp.defect_states:deltav e 0.000000E+00 0.000000E+00 0.000000E+00 -1.00000E+02
127 traj.burn2.continuity_comp.defect_states:deltav e 0.000000E+00 0.000000E+00 0.000000E+00 -1.00000E+02
128 traj.burn2.continuity_comp.defect_states:deltav e 0.000000E+00 0.000000E+00 0.000000E+00 -1.00000E+02
129 traj.burn2.continuity_comp.defect_control_rates:u1_rate e 0.000000E+00 5.663291E-16 0.000000E+00 2.70338E-07
130 traj.burn2.continuity_comp.defect_control_rates:u1_rate e 0.000000E+00 -9.910760E-16 0.000000E+00 1.83827E-07
131 traj.burn2.continuity_comp.defect_control_rates:u1_rate e 0.000000E+00 -1.238845E-15 0.000000E+00 1.85294E-07
132 traj.burn2.continuity_comp.defect_control_rates:u1_rate e 0.000000E+00 -1.380427E-15 0.000000E+00 3.08323E-07
133 traj.burn2.continuity_comp.defect_controls:u1 e 0.000000E+00 0.000000E+00 0.000000E+00 2.36681E-07
134 traj.burn2.continuity_comp.defect_controls:u1 e 0.000000E+00 0.000000E+00 0.000000E+00 -1.03649E-07
135 traj.burn2.continuity_comp.defect_controls:u1 e 0.000000E+00 0.000000E+00 0.000000E+00 1.54730E-07
136 traj.burn2.continuity_comp.defect_controls:u1 e 0.000000E+00 0.000000E+00 0.000000E+00 -2.35150E-07
137 traj.coast.collocation_constraint.defects:r e 0.000000E+00 1.230090E-14 0.000000E+00 6.51946E-01
138 traj.coast.collocation_constraint.defects:r e 0.000000E+00 0.000000E+00 0.000000E+00 4.09769E-01
139 traj.coast.collocation_constraint.defects:r e 0.000000E+00 6.150449E-15 0.000000E+00 3.09746E-01
140 traj.coast.collocation_constraint.defects:r e 0.000000E+00 -3.075224E-14 0.000000E+00 2.62939E-01
141 traj.coast.collocation_constraint.defects:r e 0.000000E+00 3.997792E-14 0.000000E+00 2.41149E-01
142 traj.coast.collocation_constraint.defects:theta e 0.000000E+00 1.640120E-14 0.000000E+00 1.72249E-11
143 traj.coast.collocation_constraint.defects:theta e 0.000000E+00 0.000000E+00 0.000000E+00 1.60560E-11
144 traj.coast.collocation_constraint.defects:theta e 0.000000E+00 -2.665194E-14 0.000000E+00 1.47481E-11
145 traj.coast.collocation_constraint.defects:theta e 0.000000E+00 1.025075E-14 0.000000E+00 1.33063E-11
146 traj.coast.collocation_constraint.defects:theta e 0.000000E+00 8.200598E-15 0.000000E+00 1.16247E-11
147 traj.coast.collocation_constraint.defects:vr e 0.000000E+00 1.486358E-14 0.000000E+00 3.33082E-01
148 traj.coast.collocation_constraint.defects:vr e 0.000000E+00 1.383851E-14 0.000000E+00 2.96282E-01
149 traj.coast.collocation_constraint.defects:vr e 0.000000E+00 -1.025075E-14 0.000000E+00 2.19622E-01
150 traj.coast.collocation_constraint.defects:vr e 0.000000E+00 5.125374E-16 0.000000E+00 1.43539E-01
151 traj.coast.collocation_constraint.defects:vr e 0.000000E+00 -2.050150E-15 0.000000E+00 7.13580E-02
152 traj.coast.collocation_constraint.defects:vt e 0.000000E+00 -1.640120E-14 0.000000E+00 1.24448E+00
153 traj.coast.collocation_constraint.defects:vt e 0.000000E+00 1.025075E-14 0.000000E+00 1.22184E+00
154 traj.coast.collocation_constraint.defects:vt e 0.000000E+00 -1.025075E-14 0.000000E+00 1.25922E+00
155 traj.coast.collocation_constraint.defects:vt e 0.000000E+00 2.818956E-15 0.000000E+00 1.30095E+00
156 traj.coast.collocation_constraint.defects:vt e 0.000000E+00 -1.537612E-15 0.000000E+00 1.32831E+00
157 traj.coast.collocation_constraint.defects:accel e 0.000000E+00 5.716235E-19 0.000000E+00 -3.93473E+01
158 traj.coast.collocation_constraint.defects:accel e 0.000000E+00 3.109687E-19 0.000000E+00 -2.33528E+01
159 traj.coast.collocation_constraint.defects:accel e 0.000000E+00 -3.586290E-20 0.000000E+00 -9.39965E+00
160 traj.coast.collocation_constraint.defects:accel e 0.000000E+00 -3.287513E-19 0.000000E+00 -1.64492E+00
161 traj.coast.collocation_constraint.defects:accel e 0.000000E+00 -5.040139E-19 0.000000E+00 8.86709E-01
162 traj.coast.collocation_constraint.defects:deltav e 0.000000E+00 -4.222264E-19 0.000000E+00 -1.33333E+02
163 traj.coast.collocation_constraint.defects:deltav e 0.000000E+00 -1.469142E-18 0.000000E+00 -1.33333E+02
164 traj.coast.collocation_constraint.defects:deltav e 0.000000E+00 -1.785896E-18 0.000000E+00 -1.33333E+02
165 traj.coast.collocation_constraint.defects:deltav e 0.000000E+00 -1.352380E-18 0.000000E+00 -1.33333E+02
166 traj.coast.collocation_constraint.defects:deltav e 0.000000E+00 2.738329E-17 0.000000E+00 -1.33333E+02
167 traj.coast.continuity_comp.defect_states:r e 0.000000E+00 0.000000E+00 0.000000E+00 3.70881E+01
168 traj.coast.continuity_comp.defect_states:r e 0.000000E+00 0.000000E+00 0.000000E+00 2.60159E+01
169 traj.coast.continuity_comp.defect_states:r e 0.000000E+00 0.000000E+00 0.000000E+00 2.10638E+01
170 traj.coast.continuity_comp.defect_states:r e 0.000000E+00 0.000000E+00 0.000000E+00 1.86759E+01
171 traj.coast.continuity_comp.defect_states:theta e 0.000000E+00 0.000000E+00 0.000000E+00 1.24804E-09
172 traj.coast.continuity_comp.defect_states:theta e 0.000000E+00 0.000000E+00 0.000000E+00 1.15516E-09
173 traj.coast.continuity_comp.defect_states:theta e 0.000000E+00 0.000000E+00 0.000000E+00 1.05204E-09
174 traj.coast.continuity_comp.defect_states:theta e 0.000000E+00 0.000000E+00 0.000000E+00 9.34911E-10
175 traj.coast.continuity_comp.defect_states:vr e 0.000000E+00 0.000000E+00 0.000000E+00 2.46701E+01
176 traj.coast.continuity_comp.defect_states:vr e 0.000000E+00 0.000000E+00 0.000000E+00 1.93854E+01
177 traj.coast.continuity_comp.defect_states:vr e 0.000000E+00 0.000000E+00 0.000000E+00 1.35586E+01
178 traj.coast.continuity_comp.defect_states:vr e 0.000000E+00 0.000000E+00 0.000000E+00 8.01335E+00
179 traj.coast.continuity_comp.defect_states:vt e 0.000000E+00 0.000000E+00 0.000000E+00 9.12968E+01
180 traj.coast.continuity_comp.defect_states:vt e 0.000000E+00 0.000000E+00 0.000000E+00 9.28067E+01
181 traj.coast.continuity_comp.defect_states:vt e 0.000000E+00 0.000000E+00 0.000000E+00 9.61260E+01
182 traj.coast.continuity_comp.defect_states:vt e 0.000000E+00 0.000000E+00 0.000000E+00 9.88357E+01
183 traj.coast.continuity_comp.defect_states:accel e 0.000000E+00 3.565036E-19 0.000000E+00 -2.39279E+01
184 traj.coast.continuity_comp.defect_states:accel e 0.000000E+00 1.024842E-19 0.000000E+00 -1.15749E+01
185 traj.coast.continuity_comp.defect_states:accel e 0.000000E+00 -1.481956E-19 0.000000E+00 -3.36338E+00
186 traj.coast.continuity_comp.defect_states:accel e 0.000000E+00 -3.294110E-19 0.000000E+00 2.24042E-01
187 traj.coast.continuity_comp.defect_states:deltav e 0.000000E+00 0.000000E+00 0.000000E+00 -1.00000E+02
188 traj.coast.continuity_comp.defect_states:deltav e 0.000000E+00 0.000000E+00 0.000000E+00 -1.00000E+02
189 traj.coast.continuity_comp.defect_states:deltav e 0.000000E+00 0.000000E+00 0.000000E+00 -1.00000E+02
190 traj.coast.continuity_comp.defect_states:deltav e 0.000000E+00 0.000000E+00 0.000000E+00 -1.00000E+02
Exit Status
Inform Description
0 Solve Succeeded
--------------------------------------------------------------------------------
/home/runner/work/dymos/dymos/.openmdao-pixi/.pixi/envs/dev/lib/python3.13/site-packages/openmdao/visualization/opt_report/opt_report.py:611: UserWarning: Attempting to set identical low and high ylims makes transformation singular; automatically expanding.
ax.set_ylim([ymin_plot, ymax_plot])
Simulating trajectory traj
Done simulating trajectory traj
Problem: problem
Driver: pyOptSparseDriver
success : True
iterations : 30
runtime : 2.3520E+00 s
model_evals : 30
model_time : 9.3870E-02 s
deriv_evals : 29
deriv_time : 8.8579E-01 s
exit_status : SUCCESS
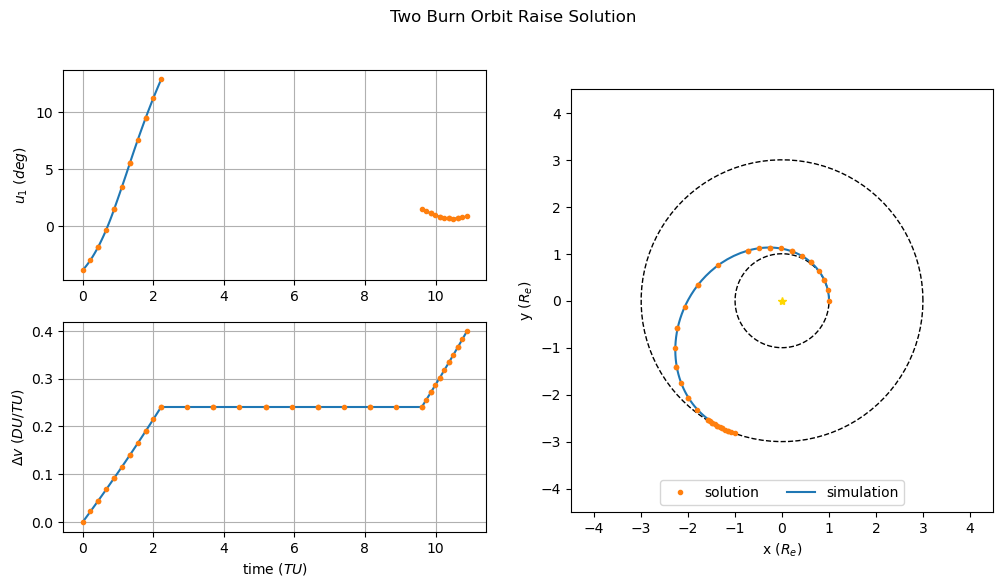
Plotting the results#
The following code cell reads the resulting state, time, and control histories from the solution and simulation record files and plots them. It is collapsed by default but can be viewed by expanding it with the button to the right.
<>:25: SyntaxWarning: invalid escape sequence '\D'
<>:25: SyntaxWarning: invalid escape sequence '\D'
/tmp/ipykernel_7592/2573435747.py:25: SyntaxWarning: invalid escape sequence '\D'
ax_deltav.set_ylabel('${\Delta}v$ ($DU/TU$)')
References#
Paul J Enright and Brace A Conway. Optimal finite-thrust spacecraft trajectories using collocation and nonlinear programming. Journal of Guidance, Control, and Dynamics, 14(5):981–985, 1991.