SSTO Earth Launch#
This example is based on the Time-Optimal Launch of a Titan II example given in Appendix B of Longuski [LGuzmanP14]. It finds the pitch profile for a single-stage-to-orbit launch vehicle that minimizes the time required to reach orbit insertion under constant thrust.
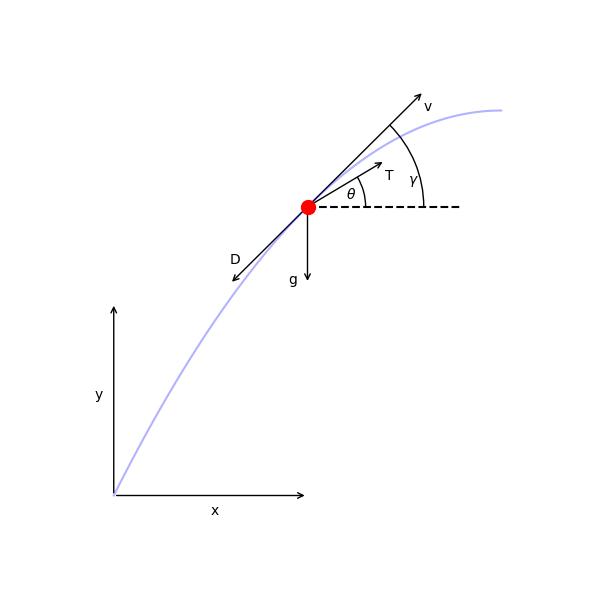
The vehicle dynamics are given by
The initial conditions are
and the final conditions are
Defining the ODE#
Generally, one could define the ODE system as a composite group of multile components. The atmosphere component computes density (\(\rho\)). The eom component computes the state rates. Decomposing the ODE into smaller calculations makes it easier to derive the analytic derivatives.
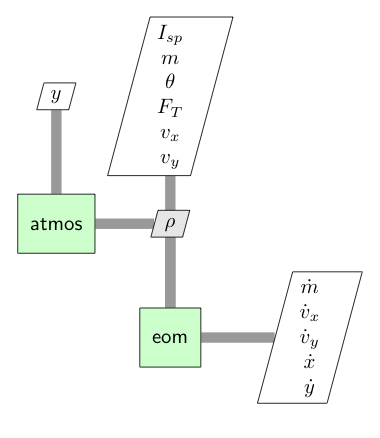
However, for this example we will demonstrate the use of complex-step differentiation and define the ODE as a single component. This saves time up front in the deevlopment of the ODE at a minor cost in execution time.
The unconnected inputs to the EOM at the top of the diagram are provided by the Dymos phase as states, controls, or time values. The outputs, including the state rates, are shown on the right side of the diagram. The Dymos phases use state rate values to ensure that the integration technique satisfies the dynamics of the system.
import openmdao.api as om
import numpy as np
class LaunchVehicleODE(om.ExplicitComponent):
def initialize(self):
self.options.declare('num_nodes', types=int,
desc='Number of nodes to be evaluated in the RHS')
self.options.declare('g', types=float, default=9.80665,
desc='Gravitational acceleration, m/s**2')
self.options.declare('rho_ref', types=float, default=1.225,
desc='Reference atmospheric density, kg/m**3')
self.options.declare('h_scale', types=float, default=8.44E3,
desc='Reference altitude, m')
self.options.declare('CD', types=float, default=0.5,
desc='coefficient of drag')
self.options.declare('S', types=float, default=7.069,
desc='aerodynamic reference area (m**2)')
def setup(self):
nn = self.options['num_nodes']
self.add_input('y',
val=np.zeros(nn),
desc='altitude',
units='m')
self.add_input('vx',
val=np.zeros(nn),
desc='x velocity',
units='m/s')
self.add_input('vy',
val=np.zeros(nn),
desc='y velocity',
units='m/s')
self.add_input('m',
val=np.zeros(nn),
desc='mass',
units='kg')
self.add_input('theta',
val=np.zeros(nn),
desc='pitch angle',
units='rad')
self.add_input('thrust',
val=2100000 * np.ones(nn),
desc='thrust',
units='N')
self.add_input('Isp',
val=265.2 * np.ones(nn),
desc='specific impulse',
units='s')
# Outputs
self.add_output('xdot',
val=np.zeros(nn),
desc='velocity component in x',
units='m/s')
self.add_output('ydot',
val=np.zeros(nn),
desc='velocity component in y',
units='m/s')
self.add_output('vxdot',
val=np.zeros(nn),
desc='x acceleration magnitude',
units='m/s**2')
self.add_output('vydot',
val=np.zeros(nn),
desc='y acceleration magnitude',
units='m/s**2')
self.add_output('mdot',
val=np.zeros(nn),
desc='mass rate of change',
units='kg/s')
self.add_output('rho',
val=np.zeros(nn),
desc='density',
units='kg/m**3')
# Setup partials
# Complex-step derivatives
self.declare_coloring(wrt='*', method='cs')
def compute(self, inputs, outputs):
theta = inputs['theta']
cos_theta = np.cos(theta)
sin_theta = np.sin(theta)
vx = inputs['vx']
vy = inputs['vy']
m = inputs['m']
F_T = inputs['thrust']
Isp = inputs['Isp']
y = inputs['y']
g = self.options['g']
rho_ref = self.options['rho_ref']
h_scale = self.options['h_scale']
CDA = self.options['CD'] * self.options['S']
outputs['rho'] = rho_ref * np.exp(-y / h_scale)
outputs['xdot'] = vx
outputs['ydot'] = vy
outputs['vxdot'] = (F_T * cos_theta - 0.5 * CDA * outputs['rho'] * vx**2) / m
outputs['vydot'] = (F_T * sin_theta - 0.5 * CDA * outputs['rho'] * vy**2) / m - g
outputs['mdot'] = -F_T / (g * Isp)
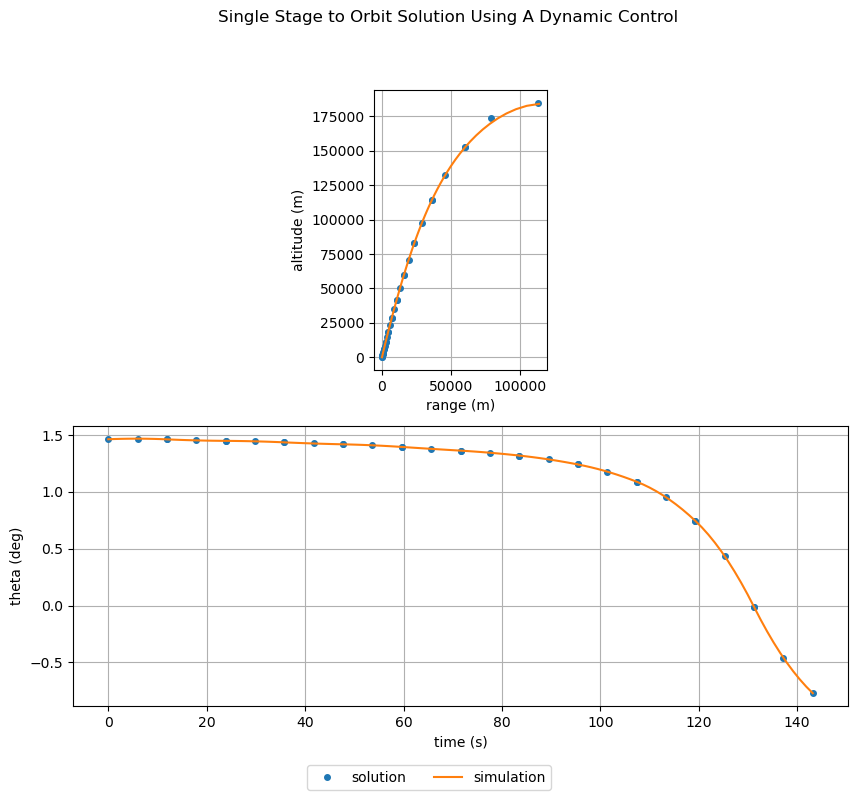
Solving the problem#
import matplotlib.pyplot as plt
import openmdao.api as om
import dymos as dm
#
# Setup and solve the optimal control problem
#
p = om.Problem(model=om.Group())
p.driver = om.pyOptSparseDriver()
p.driver.declare_coloring(tol=1.0E-12)
#
# Initialize our Trajectory and Phase
#
traj = dm.Trajectory()
phase = dm.Phase(ode_class=LaunchVehicleODE,
transcription=dm.GaussLobatto(num_segments=12, order=3, compressed=False))
traj.add_phase('phase0', phase)
p.model.add_subsystem('traj', traj)
#
# Set the options for the variables
#
phase.set_time_options(fix_initial=True, duration_bounds=(10, 500))
phase.add_state('x', fix_initial=True, ref=1.0E5, defect_ref=10000.0,
rate_source='xdot')
phase.add_state('y', fix_initial=True, ref=1.0E5, defect_ref=10000.0,
rate_source='ydot')
phase.add_state('vx', fix_initial=True, ref=1.0E3, defect_ref=1000.0,
rate_source='vxdot')
phase.add_state('vy', fix_initial=True, ref=1.0E3, defect_ref=1000.0,
rate_source='vydot')
phase.add_state('m', fix_initial=True, ref=1.0E3, defect_ref=100.0,
rate_source='mdot')
phase.add_control('theta', units='rad', lower=-1.57, upper=1.57, targets=['theta'])
phase.add_parameter('thrust', units='N', opt=False, val=2100000.0, targets=['thrust'])
#
# Set the options for our constraints and objective
#
phase.add_boundary_constraint('y', loc='final', equals=1.85E5, linear=True)
phase.add_boundary_constraint('vx', loc='final', equals=7796.6961)
phase.add_boundary_constraint('vy', loc='final', equals=0)
phase.add_objective('time', loc='final', scaler=0.01)
p.model.linear_solver = om.DirectSolver()
#
# Setup and set initial values
#
p.setup(check=True)
phase.set_time_val(initial=0.0, duration=150.0)
phase.set_state_val('x', [0, 1.15E5])
phase.set_state_val('y', [0, 1.85E5])
phase.set_state_val('vy', [1.0E-6, 0])
phase.set_state_val('m', [117000, 1163])
phase.set_control_val('theta', [1.5, -0.76])
phase.set_parameter_val('thrust', 2.1, units='MN')
#
# Solve the Problem
#
dm.run_problem(p, simulate=True)
INFO: checking out_of_order...
INFO: out_of_order check complete (0.000363 sec).
INFO: checking system...
INFO: system check complete (0.000020 sec).
INFO: checking solvers...
INFO: solvers check complete (0.000206 sec).
INFO: checking dup_inputs...
INFO: dup_inputs check complete (0.000085 sec).
INFO: checking missing_recorders...
INFO: missing_recorders check complete (0.000010 sec).
INFO: checking unserializable_options...
INFO: unserializable_options check complete (0.001288 sec).
INFO: checking comp_has_no_outputs...
INFO: comp_has_no_outputs check complete (0.000033 sec).
INFO: checking auto_ivc_warnings...
INFO: auto_ivc_warnings check complete (0.000002 sec).
/home/runner/work/dymos/dymos/.openmdao-pixi/.pixi/envs/dev/lib/python3.13/site-packages/openmdao/utils/relevance.py:1234: OpenMDAOWarning:The top level group has a nonlinear solver that computes gradients, so the entire model will be included in the optimization iteration.
Coloring for 'traj.phases.phase0.rhs_disc' (class LaunchVehicleODE)
Jacobian shape: (144, 168) (1.15% nonzero)
FWD solves: 5 REV solves: 0
Total colors vs. total size: 5 vs 168 (97.02% improvement)
Sparsity computed using tolerance: 1e-25.
Dense partial jacobian for LaunchVehicleODE 'traj.phases.phase0.rhs_disc' was computed 3 times.
Time to compute sparsity: 0.0190 sec
Time to compute coloring: 0.0098 sec
Memory to compute coloring: 0.1953 MB
Coloring for 'traj.phases.phase0.rhs_col' (class LaunchVehicleODE)
Jacobian shape: (72, 84) (2.48% nonzero)
FWD solves: 5 REV solves: 0
Total colors vs. total size: 5 vs 84 (94.05% improvement)
Sparsity computed using tolerance: 1e-25.
Dense partial jacobian for LaunchVehicleODE 'traj.phases.phase0.rhs_col' was computed 3 times.
Time to compute sparsity: 0.0104 sec
Time to compute coloring: 0.0052 sec
Memory to compute coloring: 0.0156 MB
Jacobian shape: (74, 152) (4.64% nonzero)
FWD solves: 12 REV solves: 0
Total colors vs. total size: 12 vs 152 (92.11% improvement)
Sparsity computed using tolerance: 1e-12.
Dense total jacobian for Problem 'problem' was computed 3 times.
Time to compute sparsity: 0.1321 sec
Time to compute coloring: 0.0792 sec
Memory to compute coloring: 0.2227 MB
Coloring created on: 2026-05-13 15:01:38
Optimization Problem -- Optimization using pyOpt_sparse
================================================================================
Objective Function: _objfunc
Solution:
--------------------------------------------------------------------------------
Total Time: 20.2101
User Objective Time : 4.8792
User Sensitivity Time : 6.4141
Interface Time : 3.2888
Opt Solver Time: 5.6281
Calls to Objective Function : 4907
Calls to Sens Function : 501
Objectives
Index Name Value
0 traj.phase0.t 1.431610E+00
Variables (c - continuous, i - integer, d - discrete)
Index Name Type Lower Bound Value Upper Bound Status
0 traj.phase0.t_duration_0 c 1.000000E+01 1.431610E+02 5.000000E+02
1 traj.phase0.states:x_0 c -1.000000E+25 1.487856E-03 1.000000E+25
2 traj.phase0.states:x_1 c -1.000000E+25 1.487856E-03 1.000000E+25
3 traj.phase0.states:x_2 c -1.000000E+25 6.019048E-03 1.000000E+25
4 traj.phase0.states:x_3 c -1.000000E+25 6.019048E-03 1.000000E+25
5 traj.phase0.states:x_4 c -1.000000E+25 1.421854E-02 1.000000E+25
6 traj.phase0.states:x_5 c -1.000000E+25 1.421854E-02 1.000000E+25
7 traj.phase0.states:x_6 c -1.000000E+25 2.689845E-02 1.000000E+25
8 traj.phase0.states:x_7 c -1.000000E+25 2.689845E-02 1.000000E+25
9 traj.phase0.states:x_8 c -1.000000E+25 4.524355E-02 1.000000E+25
10 traj.phase0.states:x_9 c -1.000000E+25 4.524355E-02 1.000000E+25
11 traj.phase0.states:x_10 c -1.000000E+25 7.110095E-02 1.000000E+25
12 traj.phase0.states:x_11 c -1.000000E+25 7.110095E-02 1.000000E+25
13 traj.phase0.states:x_12 c -1.000000E+25 1.074079E-01 1.000000E+25
14 traj.phase0.states:x_13 c -1.000000E+25 1.074079E-01 1.000000E+25
15 traj.phase0.states:x_14 c -1.000000E+25 1.590280E-01 1.000000E+25
16 traj.phase0.states:x_15 c -1.000000E+25 1.590280E-01 1.000000E+25
17 traj.phase0.states:x_16 c -1.000000E+25 2.358233E-01 1.000000E+25
18 traj.phase0.states:x_17 c -1.000000E+25 2.358233E-01 1.000000E+25
19 traj.phase0.states:x_18 c -1.000000E+25 3.613548E-01 1.000000E+25
20 traj.phase0.states:x_19 c -1.000000E+25 3.613548E-01 1.000000E+25
21 traj.phase0.states:x_20 c -1.000000E+25 6.019910E-01 1.000000E+25
22 traj.phase0.states:x_21 c -1.000000E+25 6.019910E-01 1.000000E+25
23 traj.phase0.states:x_22 c -1.000000E+25 1.133557E+00 1.000000E+25
24 traj.phase0.states:y_0 c -1.000000E+25 6.065518E-03 1.000000E+25
25 traj.phase0.states:y_1 c -1.000000E+25 6.065518E-03 1.000000E+25
26 traj.phase0.states:y_2 c -1.000000E+25 2.553573E-02 1.000000E+25
27 traj.phase0.states:y_3 c -1.000000E+25 2.553573E-02 1.000000E+25
28 traj.phase0.states:y_4 c -1.000000E+25 6.026157E-02 1.000000E+25
29 traj.phase0.states:y_5 c -1.000000E+25 6.026157E-02 1.000000E+25
30 traj.phase0.states:y_6 c -1.000000E+25 1.125220E-01 1.000000E+25
31 traj.phase0.states:y_7 c -1.000000E+25 1.125220E-01 1.000000E+25
32 traj.phase0.states:y_8 c -1.000000E+25 1.858347E-01 1.000000E+25
33 traj.phase0.states:y_9 c -1.000000E+25 1.858347E-01 1.000000E+25
34 traj.phase0.states:y_10 c -1.000000E+25 2.855845E-01 1.000000E+25
35 traj.phase0.states:y_11 c -1.000000E+25 2.855845E-01 1.000000E+25
36 traj.phase0.states:y_12 c -1.000000E+25 4.193247E-01 1.000000E+25
37 traj.phase0.states:y_13 c -1.000000E+25 4.193247E-01 1.000000E+25
38 traj.phase0.states:y_14 c -1.000000E+25 5.970368E-01 1.000000E+25
39 traj.phase0.states:y_15 c -1.000000E+25 5.970368E-01 1.000000E+25
40 traj.phase0.states:y_16 c -1.000000E+25 8.317478E-01 1.000000E+25
41 traj.phase0.states:y_17 c -1.000000E+25 8.317478E-01 1.000000E+25
42 traj.phase0.states:y_18 c -1.000000E+25 1.139673E+00 1.000000E+25
43 traj.phase0.states:y_19 c -1.000000E+25 1.139673E+00 1.000000E+25
44 traj.phase0.states:y_20 c -1.000000E+25 1.524622E+00 1.000000E+25
45 traj.phase0.states:y_21 c -1.000000E+25 1.524622E+00 1.000000E+25
46 traj.phase0.states:y_22 c -1.000000E+25 1.850000E+00 1.000000E+25
47 traj.phase0.states:vx_0 c -1.000000E+27 2.430187E-02 1.000000E+27
48 traj.phase0.states:vx_1 c -1.000000E+27 2.430187E-02 1.000000E+27
49 traj.phase0.states:vx_2 c -1.000000E+27 5.257129E-02 1.000000E+27
50 traj.phase0.states:vx_3 c -1.000000E+27 5.257129E-02 1.000000E+27
51 traj.phase0.states:vx_4 c -1.000000E+27 8.598762E-02 1.000000E+27
52 traj.phase0.states:vx_5 c -1.000000E+27 8.598762E-02 1.000000E+27
53 traj.phase0.states:vx_6 c -1.000000E+27 1.282157E-01 1.000000E+27
54 traj.phase0.states:vx_7 c -1.000000E+27 1.282157E-01 1.000000E+27
55 traj.phase0.states:vx_8 c -1.000000E+27 1.818479E-01 1.000000E+27
56 traj.phase0.states:vx_9 c -1.000000E+27 1.818479E-01 1.000000E+27
57 traj.phase0.states:vx_10 c -1.000000E+27 2.556757E-01 1.000000E+27
58 traj.phase0.states:vx_11 c -1.000000E+27 2.556757E-01 1.000000E+27
59 traj.phase0.states:vx_12 c -1.000000E+27 3.594522E-01 1.000000E+27
60 traj.phase0.states:vx_13 c -1.000000E+27 3.594522E-01 1.000000E+27
61 traj.phase0.states:vx_14 c -1.000000E+27 5.188797E-01 1.000000E+27
62 traj.phase0.states:vx_15 c -1.000000E+27 5.188797E-01 1.000000E+27
63 traj.phase0.states:vx_16 c -1.000000E+27 7.985170E-01 1.000000E+27
64 traj.phase0.states:vx_17 c -1.000000E+27 7.985170E-01 1.000000E+27
65 traj.phase0.states:vx_18 c -1.000000E+27 1.390633E+00 1.000000E+27
66 traj.phase0.states:vx_19 c -1.000000E+27 1.390633E+00 1.000000E+27
67 traj.phase0.states:vx_20 c -1.000000E+27 2.873327E+00 1.000000E+27
68 traj.phase0.states:vx_21 c -1.000000E+27 2.873327E+00 1.000000E+27
69 traj.phase0.states:vx_22 c -1.000000E+27 7.796696E+00 1.000000E+27
70 traj.phase0.states:vy_0 c -1.000000E+27 1.044568E-01 1.000000E+27
71 traj.phase0.states:vy_1 c -1.000000E+27 1.044568E-01 1.000000E+27
72 traj.phase0.states:vy_2 c -1.000000E+27 2.244598E-01 1.000000E+27
73 traj.phase0.states:vy_3 c -1.000000E+27 2.244598E-01 1.000000E+27
74 traj.phase0.states:vy_4 c -1.000000E+27 3.607782E-01 1.000000E+27
75 traj.phase0.states:vy_5 c -1.000000E+27 3.607782E-01 1.000000E+27
76 traj.phase0.states:vy_6 c -1.000000E+27 5.201688E-01 1.000000E+27
77 traj.phase0.states:vy_7 c -1.000000E+27 5.201688E-01 1.000000E+27
78 traj.phase0.states:vy_8 c -1.000000E+27 7.163678E-01 1.000000E+27
79 traj.phase0.states:vy_9 c -1.000000E+27 7.163678E-01 1.000000E+27
80 traj.phase0.states:vy_10 c -1.000000E+27 9.664004E-01 1.000000E+27
81 traj.phase0.states:vy_11 c -1.000000E+27 9.664004E-01 1.000000E+27
82 traj.phase0.states:vy_12 c -1.000000E+27 1.289544E+00 1.000000E+27
83 traj.phase0.states:vy_13 c -1.000000E+27 1.289544E+00 1.000000E+27
84 traj.phase0.states:vy_14 c -1.000000E+27 1.707754E+00 1.000000E+27
85 traj.phase0.states:vy_15 c -1.000000E+27 1.707754E+00 1.000000E+27
86 traj.phase0.states:vy_16 c -1.000000E+27 2.250458E+00 1.000000E+27
87 traj.phase0.states:vy_17 c -1.000000E+27 2.250458E+00 1.000000E+27
88 traj.phase0.states:vy_18 c -1.000000E+27 2.926577E+00 1.000000E+27
89 traj.phase0.states:vy_19 c -1.000000E+27 2.926577E+00 1.000000E+27
90 traj.phase0.states:vy_20 c -1.000000E+27 3.385259E+00 1.000000E+27
91 traj.phase0.states:vy_21 c -1.000000E+27 3.385259E+00 1.000000E+27
92 traj.phase0.states:vy_22 c -1.000000E+27 1.205964E-21 1.000000E+27
93 traj.phase0.states:m_0 c -1.000000E+27 1.073668E+02 1.000000E+27
94 traj.phase0.states:m_1 c -1.000000E+27 1.073668E+02 1.000000E+27
95 traj.phase0.states:m_2 c -1.000000E+27 9.773368E+01 1.000000E+27
96 traj.phase0.states:m_3 c -1.000000E+27 9.773368E+01 1.000000E+27
97 traj.phase0.states:m_4 c -1.000000E+27 8.810053E+01 1.000000E+27
98 traj.phase0.states:m_5 c -1.000000E+27 8.810053E+01 1.000000E+27
99 traj.phase0.states:m_6 c -1.000000E+27 7.846737E+01 1.000000E+27
100 traj.phase0.states:m_7 c -1.000000E+27 7.846737E+01 1.000000E+27
101 traj.phase0.states:m_8 c -1.000000E+27 6.883421E+01 1.000000E+27
102 traj.phase0.states:m_9 c -1.000000E+27 6.883421E+01 1.000000E+27
103 traj.phase0.states:m_10 c -1.000000E+27 5.920105E+01 1.000000E+27
104 traj.phase0.states:m_11 c -1.000000E+27 5.920105E+01 1.000000E+27
105 traj.phase0.states:m_12 c -1.000000E+27 4.956789E+01 1.000000E+27
106 traj.phase0.states:m_13 c -1.000000E+27 4.956789E+01 1.000000E+27
107 traj.phase0.states:m_14 c -1.000000E+27 3.993474E+01 1.000000E+27
108 traj.phase0.states:m_15 c -1.000000E+27 3.993474E+01 1.000000E+27
109 traj.phase0.states:m_16 c -1.000000E+27 3.030158E+01 1.000000E+27
110 traj.phase0.states:m_17 c -1.000000E+27 3.030158E+01 1.000000E+27
111 traj.phase0.states:m_18 c -1.000000E+27 2.066842E+01 1.000000E+27
112 traj.phase0.states:m_19 c -1.000000E+27 2.066842E+01 1.000000E+27
113 traj.phase0.states:m_20 c -1.000000E+27 1.103526E+01 1.000000E+27
114 traj.phase0.states:m_21 c -1.000000E+27 1.103526E+01 1.000000E+27
115 traj.phase0.states:m_22 c -1.000000E+27 1.402105E+00 1.000000E+27
116 traj.phase0.controls:theta_0 c -1.570000E+00 1.462912E+00 1.570000E+00
117 traj.phase0.controls:theta_1 c -1.570000E+00 1.467980E+00 1.570000E+00
118 traj.phase0.controls:theta_2 c -1.570000E+00 1.461977E+00 1.570000E+00
119 traj.phase0.controls:theta_3 c -1.570000E+00 1.461977E+00 1.570000E+00
120 traj.phase0.controls:theta_4 c -1.570000E+00 1.452894E+00 1.570000E+00
121 traj.phase0.controls:theta_5 c -1.570000E+00 1.448727E+00 1.570000E+00
122 traj.phase0.controls:theta_6 c -1.570000E+00 1.448727E+00 1.570000E+00
123 traj.phase0.controls:theta_7 c -1.570000E+00 1.444585E+00 1.570000E+00
124 traj.phase0.controls:theta_8 c -1.570000E+00 1.435581E+00 1.570000E+00
125 traj.phase0.controls:theta_9 c -1.570000E+00 1.435581E+00 1.570000E+00
126 traj.phase0.controls:theta_10 c -1.570000E+00 1.425547E+00 1.570000E+00
127 traj.phase0.controls:theta_11 c -1.570000E+00 1.418312E+00 1.570000E+00
128 traj.phase0.controls:theta_12 c -1.570000E+00 1.418312E+00 1.570000E+00
129 traj.phase0.controls:theta_13 c -1.570000E+00 1.409631E+00 1.570000E+00
130 traj.phase0.controls:theta_14 c -1.570000E+00 1.395255E+00 1.570000E+00
131 traj.phase0.controls:theta_15 c -1.570000E+00 1.395255E+00 1.570000E+00
132 traj.phase0.controls:theta_16 c -1.570000E+00 1.378519E+00 1.570000E+00
133 traj.phase0.controls:theta_17 c -1.570000E+00 1.362755E+00 1.570000E+00
134 traj.phase0.controls:theta_18 c -1.570000E+00 1.362755E+00 1.570000E+00
135 traj.phase0.controls:theta_19 c -1.570000E+00 1.344291E+00 1.570000E+00
136 traj.phase0.controls:theta_20 c -1.570000E+00 1.319458E+00 1.570000E+00
137 traj.phase0.controls:theta_21 c -1.570000E+00 1.319458E+00 1.570000E+00
138 traj.phase0.controls:theta_22 c -1.570000E+00 1.285856E+00 1.570000E+00
139 traj.phase0.controls:theta_23 c -1.570000E+00 1.241088E+00 1.570000E+00
140 traj.phase0.controls:theta_24 c -1.570000E+00 1.241088E+00 1.570000E+00
141 traj.phase0.controls:theta_25 c -1.570000E+00 1.177984E+00 1.570000E+00
142 traj.phase0.controls:theta_26 c -1.570000E+00 1.089378E+00 1.570000E+00
143 traj.phase0.controls:theta_27 c -1.570000E+00 1.089378E+00 1.570000E+00
144 traj.phase0.controls:theta_28 c -1.570000E+00 9.526167E-01 1.570000E+00
145 traj.phase0.controls:theta_29 c -1.570000E+00 7.450462E-01 1.570000E+00
146 traj.phase0.controls:theta_30 c -1.570000E+00 7.450462E-01 1.570000E+00
147 traj.phase0.controls:theta_31 c -1.570000E+00 4.342584E-01 1.570000E+00
148 traj.phase0.controls:theta_32 c -1.570000E+00 -1.215519E-02 1.570000E+00
149 traj.phase0.controls:theta_33 c -1.570000E+00 -1.215519E-02 1.570000E+00
150 traj.phase0.controls:theta_34 c -1.570000E+00 -4.588436E-01 1.570000E+00
151 traj.phase0.controls:theta_35 c -1.570000E+00 -7.704557E-01 1.570000E+00
Constraints (i - inequality, e - equality)
Index Name Type Lower Value Upper Status Lagrange Multiplier (N/A)
0 traj.phase0.y[final] e 1.850000E+05 1.850000E+05 1.850000E+05 9.00000E+100
1 traj.phase0.vx[final] e 7.796696E+03 7.796696E+03 7.796696E+03 9.00000E+100
2 traj.phase0.vy[final] e 0.000000E+00 1.205964E-18 0.000000E+00 9.00000E+100
3 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -9.407806E-10 0.000000E+00 9.00000E+100
4 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -8.172996E-09 0.000000E+00 9.00000E+100
5 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -1.280392E-08 0.000000E+00 9.00000E+100
6 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -3.967131E-08 0.000000E+00 9.00000E+100
7 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -2.434063E-08 0.000000E+00 9.00000E+100
8 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 6.302447E-09 0.000000E+00 9.00000E+100
9 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 7.311795E-08 0.000000E+00 9.00000E+100
10 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -3.371445E-08 0.000000E+00 9.00000E+100
11 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 2.793153E-08 0.000000E+00 9.00000E+100
12 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 -3.096152E-08 0.000000E+00 9.00000E+100
13 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 3.443744E-08 0.000000E+00 9.00000E+100
14 traj.phase0.collocation_constraint.defects:x e 0.000000E+00 4.978374E-10 0.000000E+00 9.00000E+100
15 traj.phase0.collocation_constraint.defects:y e 0.000000E+00 -4.307078E-08 0.000000E+00 9.00000E+100
16 traj.phase0.collocation_constraint.defects:y e 0.000000E+00 5.963431E-07 0.000000E+00 9.00000E+100
17 traj.phase0.collocation_constraint.defects:y e 0.000000E+00 1.446986E-08 0.000000E+00 9.00000E+100
18 traj.phase0.collocation_constraint.defects:y e 0.000000E+00 1.103866E-08 0.000000E+00 9.00000E+100
19 traj.phase0.collocation_constraint.defects:y e 0.000000E+00 -9.412482E-07 0.000000E+00 9.00000E+100
20 traj.phase0.collocation_constraint.defects:y e 0.000000E+00 -4.762864E-07 0.000000E+00 9.00000E+100
21 traj.phase0.collocation_constraint.defects:y e 0.000000E+00 5.733420E-07 0.000000E+00 9.00000E+100
22 traj.phase0.collocation_constraint.defects:y e 0.000000E+00 1.983726E-07 0.000000E+00 9.00000E+100
23 traj.phase0.collocation_constraint.defects:y e 0.000000E+00 7.691750E-08 0.000000E+00 9.00000E+100
24 traj.phase0.collocation_constraint.defects:y e 0.000000E+00 -3.604592E-08 0.000000E+00 9.00000E+100
25 traj.phase0.collocation_constraint.defects:y e 0.000000E+00 4.432819E-08 0.000000E+00 9.00000E+100
26 traj.phase0.collocation_constraint.defects:y e 0.000000E+00 1.113091E-08 0.000000E+00 9.00000E+100
27 traj.phase0.collocation_constraint.defects:vx e 0.000000E+00 2.608990E-08 0.000000E+00 9.00000E+100
28 traj.phase0.collocation_constraint.defects:vx e 0.000000E+00 1.197828E-07 0.000000E+00 9.00000E+100
29 traj.phase0.collocation_constraint.defects:vx e 0.000000E+00 1.736154E-07 0.000000E+00 9.00000E+100
30 traj.phase0.collocation_constraint.defects:vx e 0.000000E+00 4.691736E-07 0.000000E+00 9.00000E+100
31 traj.phase0.collocation_constraint.defects:vx e 0.000000E+00 7.879675E-07 0.000000E+00 9.00000E+100
32 traj.phase0.collocation_constraint.defects:vx e 0.000000E+00 8.169066E-07 0.000000E+00 9.00000E+100
33 traj.phase0.collocation_constraint.defects:vx e 0.000000E+00 3.557970E-07 0.000000E+00 9.00000E+100
34 traj.phase0.collocation_constraint.defects:vx e 0.000000E+00 2.129571E-07 0.000000E+00 9.00000E+100
35 traj.phase0.collocation_constraint.defects:vx e 0.000000E+00 6.357843E-07 0.000000E+00 9.00000E+100
36 traj.phase0.collocation_constraint.defects:vx e 0.000000E+00 6.365660E-07 0.000000E+00 9.00000E+100
37 traj.phase0.collocation_constraint.defects:vx e 0.000000E+00 1.285497E-07 0.000000E+00 9.00000E+100
38 traj.phase0.collocation_constraint.defects:vx e 0.000000E+00 5.880723E-08 0.000000E+00 9.00000E+100
39 traj.phase0.collocation_constraint.defects:vy e 0.000000E+00 2.675211E-07 0.000000E+00 9.00000E+100
40 traj.phase0.collocation_constraint.defects:vy e 0.000000E+00 -6.323476E-08 0.000000E+00 9.00000E+100
41 traj.phase0.collocation_constraint.defects:vy e 0.000000E+00 -1.109094E-06 0.000000E+00 E 9.00000E+100
42 traj.phase0.collocation_constraint.defects:vy e 0.000000E+00 1.052643E-06 0.000000E+00 E 9.00000E+100
43 traj.phase0.collocation_constraint.defects:vy e 0.000000E+00 5.362483E-06 0.000000E+00 E 9.00000E+100
44 traj.phase0.collocation_constraint.defects:vy e 0.000000E+00 8.545961E-06 0.000000E+00 E 9.00000E+100
45 traj.phase0.collocation_constraint.defects:vy e 0.000000E+00 4.778326E-06 0.000000E+00 E 9.00000E+100
46 traj.phase0.collocation_constraint.defects:vy e 0.000000E+00 1.364248E-06 0.000000E+00 E 9.00000E+100
47 traj.phase0.collocation_constraint.defects:vy e 0.000000E+00 1.043707E-06 0.000000E+00 E 9.00000E+100
48 traj.phase0.collocation_constraint.defects:vy e 0.000000E+00 8.438512E-07 0.000000E+00 9.00000E+100
49 traj.phase0.collocation_constraint.defects:vy e 0.000000E+00 8.904149E-08 0.000000E+00 9.00000E+100
50 traj.phase0.collocation_constraint.defects:vy e 0.000000E+00 -3.008730E-08 0.000000E+00 9.00000E+100
51 traj.phase0.collocation_constraint.defects:m e 0.000000E+00 2.034441E-14 0.000000E+00 9.00000E+100
52 traj.phase0.collocation_constraint.defects:m e 0.000000E+00 2.034441E-14 0.000000E+00 9.00000E+100
53 traj.phase0.collocation_constraint.defects:m e 0.000000E+00 2.102255E-13 0.000000E+00 9.00000E+100
54 traj.phase0.collocation_constraint.defects:m e 0.000000E+00 2.034441E-14 0.000000E+00 9.00000E+100
55 traj.phase0.collocation_constraint.defects:m e 0.000000E+00 -4.272325E-13 0.000000E+00 9.00000E+100
56 traj.phase0.collocation_constraint.defects:m e 0.000000E+00 5.086102E-13 0.000000E+00 9.00000E+100
57 traj.phase0.collocation_constraint.defects:m e 0.000000E+00 -4.679214E-13 0.000000E+00 9.00000E+100
58 traj.phase0.collocation_constraint.defects:m e 0.000000E+00 8.748095E-13 0.000000E+00 9.00000E+100
59 traj.phase0.collocation_constraint.defects:m e 0.000000E+00 -2.916032E-13 0.000000E+00 9.00000E+100
60 traj.phase0.collocation_constraint.defects:m e 0.000000E+00 -1.424108E-13 0.000000E+00 9.00000E+100
61 traj.phase0.collocation_constraint.defects:m e 0.000000E+00 2.916032E-13 0.000000E+00 9.00000E+100
62 traj.phase0.collocation_constraint.defects:m e 0.000000E+00 8.815910E-14 0.000000E+00 9.00000E+100
63 traj.phase0.continuity_comp.defect_states:x e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
64 traj.phase0.continuity_comp.defect_states:x e 0.000000E+00 -1.136868E-13 0.000000E+00 9.00000E+100
65 traj.phase0.continuity_comp.defect_states:x e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
66 traj.phase0.continuity_comp.defect_states:x e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
67 traj.phase0.continuity_comp.defect_states:x e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
68 traj.phase0.continuity_comp.defect_states:x e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
69 traj.phase0.continuity_comp.defect_states:x e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
70 traj.phase0.continuity_comp.defect_states:x e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
71 traj.phase0.continuity_comp.defect_states:x e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
72 traj.phase0.continuity_comp.defect_states:x e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
73 traj.phase0.continuity_comp.defect_states:x e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
74 traj.phase0.continuity_comp.defect_states:y e 0.000000E+00 -1.136868E-13 0.000000E+00 9.00000E+100
75 traj.phase0.continuity_comp.defect_states:y e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
76 traj.phase0.continuity_comp.defect_states:y e 0.000000E+00 9.094947E-13 0.000000E+00 9.00000E+100
77 traj.phase0.continuity_comp.defect_states:y e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
78 traj.phase0.continuity_comp.defect_states:y e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
79 traj.phase0.continuity_comp.defect_states:y e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
80 traj.phase0.continuity_comp.defect_states:y e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
81 traj.phase0.continuity_comp.defect_states:y e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
82 traj.phase0.continuity_comp.defect_states:y e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
83 traj.phase0.continuity_comp.defect_states:y e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
84 traj.phase0.continuity_comp.defect_states:y e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
85 traj.phase0.continuity_comp.defect_states:vx e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
86 traj.phase0.continuity_comp.defect_states:vx e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
87 traj.phase0.continuity_comp.defect_states:vx e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
88 traj.phase0.continuity_comp.defect_states:vx e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
89 traj.phase0.continuity_comp.defect_states:vx e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
90 traj.phase0.continuity_comp.defect_states:vx e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
91 traj.phase0.continuity_comp.defect_states:vx e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
92 traj.phase0.continuity_comp.defect_states:vx e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
93 traj.phase0.continuity_comp.defect_states:vx e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
94 traj.phase0.continuity_comp.defect_states:vx e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
95 traj.phase0.continuity_comp.defect_states:vx e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
96 traj.phase0.continuity_comp.defect_states:vy e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
97 traj.phase0.continuity_comp.defect_states:vy e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
98 traj.phase0.continuity_comp.defect_states:vy e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
99 traj.phase0.continuity_comp.defect_states:vy e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
100 traj.phase0.continuity_comp.defect_states:vy e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
101 traj.phase0.continuity_comp.defect_states:vy e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
102 traj.phase0.continuity_comp.defect_states:vy e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
103 traj.phase0.continuity_comp.defect_states:vy e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
104 traj.phase0.continuity_comp.defect_states:vy e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
105 traj.phase0.continuity_comp.defect_states:vy e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
106 traj.phase0.continuity_comp.defect_states:vy e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
107 traj.phase0.continuity_comp.defect_states:m e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
108 traj.phase0.continuity_comp.defect_states:m e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
109 traj.phase0.continuity_comp.defect_states:m e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
110 traj.phase0.continuity_comp.defect_states:m e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
111 traj.phase0.continuity_comp.defect_states:m e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
112 traj.phase0.continuity_comp.defect_states:m e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
113 traj.phase0.continuity_comp.defect_states:m e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
114 traj.phase0.continuity_comp.defect_states:m e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
115 traj.phase0.continuity_comp.defect_states:m e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
116 traj.phase0.continuity_comp.defect_states:m e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
117 traj.phase0.continuity_comp.defect_states:m e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
118 traj.phase0.continuity_comp.defect_control_rates:theta_rate e 0.000000E+00 7.327724E-14 0.000000E+00 9.00000E+100
119 traj.phase0.continuity_comp.defect_control_rates:theta_rate e 0.000000E+00 3.198992E-14 0.000000E+00 9.00000E+100
120 traj.phase0.continuity_comp.defect_control_rates:theta_rate e 0.000000E+00 -2.807848E-14 0.000000E+00 9.00000E+100
121 traj.phase0.continuity_comp.defect_control_rates:theta_rate e 0.000000E+00 2.669707E-15 0.000000E+00 9.00000E+100
122 traj.phase0.continuity_comp.defect_control_rates:theta_rate e 0.000000E+00 1.083404E-14 0.000000E+00 9.00000E+100
123 traj.phase0.continuity_comp.defect_control_rates:theta_rate e 0.000000E+00 2.641768E-14 0.000000E+00 9.00000E+100
124 traj.phase0.continuity_comp.defect_control_rates:theta_rate e 0.000000E+00 -2.620038E-14 0.000000E+00 9.00000E+100
125 traj.phase0.continuity_comp.defect_control_rates:theta_rate e 0.000000E+00 -2.396527E-14 0.000000E+00 9.00000E+100
126 traj.phase0.continuity_comp.defect_control_rates:theta_rate e 0.000000E+00 -3.476827E-14 0.000000E+00 9.00000E+100
127 traj.phase0.continuity_comp.defect_control_rates:theta_rate e 0.000000E+00 1.887421E-14 0.000000E+00 9.00000E+100
128 traj.phase0.continuity_comp.defect_control_rates:theta_rate e 0.000000E+00 3.973517E-15 0.000000E+00 9.00000E+100
129 traj.phase0.continuity_comp.defect_controls:theta e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
130 traj.phase0.continuity_comp.defect_controls:theta e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
131 traj.phase0.continuity_comp.defect_controls:theta e 2.361829E-16 2.834586E-16 2.361829E-16 9.00000E+100
132 traj.phase0.continuity_comp.defect_controls:theta e 1.754950E-16 2.220446E-16 1.754950E-16 9.00000E+100
133 traj.phase0.continuity_comp.defect_controls:theta e 3.275049E-18 0.000000E+00 3.275049E-18 9.00000E+100
134 traj.phase0.continuity_comp.defect_controls:theta e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
135 traj.phase0.continuity_comp.defect_controls:theta e 3.332282E-18 7.778450E-17 3.332282E-18 9.00000E+100
136 traj.phase0.continuity_comp.defect_controls:theta e -1.186953E-17 4.018256E-17 -1.186953E-17 9.00000E+100
137 traj.phase0.continuity_comp.defect_controls:theta e 2.572893E-17 0.000000E+00 2.572893E-17 9.00000E+100
138 traj.phase0.continuity_comp.defect_controls:theta e 0.000000E+00 0.000000E+00 0.000000E+00 9.00000E+100
139 traj.phase0.continuity_comp.defect_controls:theta e 0.000000E+00 -1.734723E-18 0.000000E+00 9.00000E+100
Exit Status
Inform Description
9 Iteration limit exceeded
--------------------------------------------------------------------------------
/home/runner/work/dymos/dymos/.openmdao-pixi/.pixi/envs/dev/lib/python3.13/site-packages/openmdao/visualization/opt_report/opt_report.py:611: UserWarning: Attempting to set identical low and high ylims makes transformation singular; automatically expanding.
ax.set_ylim([ymin_plot, ymax_plot])
Simulating trajectory traj
Done simulating trajectory traj
Problem: problem
Driver: pyOptSparseDriver
success : False
iterations : 4909
runtime : 2.0477E+01 s
model_evals : 4909
model_time : 3.7327E+00 s
deriv_evals : 502
deriv_time : 6.1278E+00 s
exit_status : FAIL
References#
James M Longuski, José J Guzmán, and John E Prussing. Optimal control with aerospace applications. Springer, 1 edition, 2014. ISBN 978-1-4939-4917-5. doi:https://doi.org/10.1007/978-1-4614-8945-0.