How can I more efficiently use finite-differenced components in the ODE?#
Sometimes it’s overly burdensome to get the analytic partials for a component. In this case, OpenMDAO can use finite-differencing to approximate the partials of that component and then use those approximated partials when assembling the total derivatives. However, if a dense sub-jacobian pattern is prescribed somewhere within the ODE, it will effect all dependent calculations and cause related total jacobians to have dense patterns. In effect, a dense partial-derivative jacobian destroys the sparsity pattern of the problem. To alleviate this, OpenMDAO provides a mechanism to color the partials of a single component.
As an example, consider the minimum time-to-climb problem. The ODE of this problem consists of several components. In this case, we’re going to switch one of these components from using analytic derivatives to a finite-difference approximation. Here we use an option on the component so that we can toggle the use of partial coloring on and off for testing, but that’s not generally necessary.
class DynamicPressureCompFD(om.ExplicitComponent):
def initialize(self):
self.options.declare('num_nodes', types=int)
self.options.declare('partial_coloring', types=bool, default=False)
def setup(self):
nn = self.options['num_nodes']
self.add_input(name='rho', shape=(nn,), desc='atmospheric density', units='kg/m**3')
self.add_input(name='v', shape=(nn,), desc='air-relative velocity', units='m/s')
self.add_output(name='q', shape=(nn,), desc='dynamic pressure', units='N/m**2')
self.declare_partials(of='q', wrt='rho', method='fd')
self.declare_partials(of='q', wrt='v', method='fd')
if self.options['partial_coloring']:
self.declare_coloring(wrt=['*'], method='cs', tol=1.0E-6, num_full_jacs=2,
show_summary=True, show_sparsity=False, min_improve_pct=10.)
def compute(self, inputs, outputs):
outputs['q'] = 0.5 * inputs['rho'] * inputs['v'] ** 2
Note
When using finite-differenced partials, they should not be specified in the compute_partials method. In fact, if all partials in the component are being approximated, compute_partials should just be omitted.
In this usage of declare_coloring, we use the following arguments:
wrt=['*']This is used to specify that we wish to find sparse partials with respect to all inputs.method=['fd']We’re using finite differencing to approximate the partials for coloring. Using'cs'here (complex-step) will result in more accurate derivatives if the model supports the use of complex inputs.tol=1.0E-6Any value in the Jacobian with a value greater than this will be considered a non-zero. Since finite differencing is used and it generally encounters noise on the order of 1.0E-8, this tolerance should be larger than that. If using complex-step for the approximation method this tolerance can be smaller - as small as about 1.0E-15.num_full_jacsCompute the full jacobian this number of times before determining the partial sparsity pattern.min_improve_pctIf the number of solves required to compute the derivatives isn’t reduced by at least this amount, then coloring is ignored and the dense jacobian is used.show_summary = TruePrint the sparsity of the partial derivative jacobian. This will display something like:
Jacobian shape: (60, 120) ( 1.67% nonzero)
FWD solves: 2 REV solves: 0
Total colors vs. total size: 2 vs 120 (98.3% improvement)
Sparsity computed using tolerance: 1e-06
Time to compute sparsity: 0.011868 sec.
Time to compute coloring: 0.001385 sec.
show_sparsity=TrueDisplay the sparsity pattern in standard output to provide a visual indication whether or not it is working. Here, this outputs the jacobian ofrhowith two diagonal bands - one for each of the two inputs.
Approx coloring for 'traj.phases.phase0.rhs_col.aero.q_comp' (class DynamicPressureCompFD)
f.............................f............................. 0 q
.f.............................f............................ 1 q
..f.............................f........................... 2 q
...f.............................f.......................... 3 q
....f.............................f......................... 4 q
.....f.............................f........................ 5 q
......f.............................f....................... 6 q
.......f.............................f...................... 7 q
........f.............................f..................... 8 q
.........f.............................f.................... 9 q
..........f.............................f................... 10 q
...........f.............................f.................. 11 q
............f.............................f................. 12 q
.............f.............................f................ 13 q
..............f.............................f............... 14 q
...............f.............................f.............. 15 q
................f.............................f............. 16 q
.................f.............................f............ 17 q
..................f.............................f........... 18 q
...................f.............................f.......... 19 q
....................f.............................f......... 20 q
.....................f.............................f........ 21 q
......................f.............................f....... 22 q
.......................f.............................f...... 23 q
........................f.............................f..... 24 q
.........................f.............................f.... 25 q
..........................f.............................f... 26 q
...........................f.............................f.. 27 q
............................f.............................f. 28 q
.............................f.............................f 29 q
|rho
|v
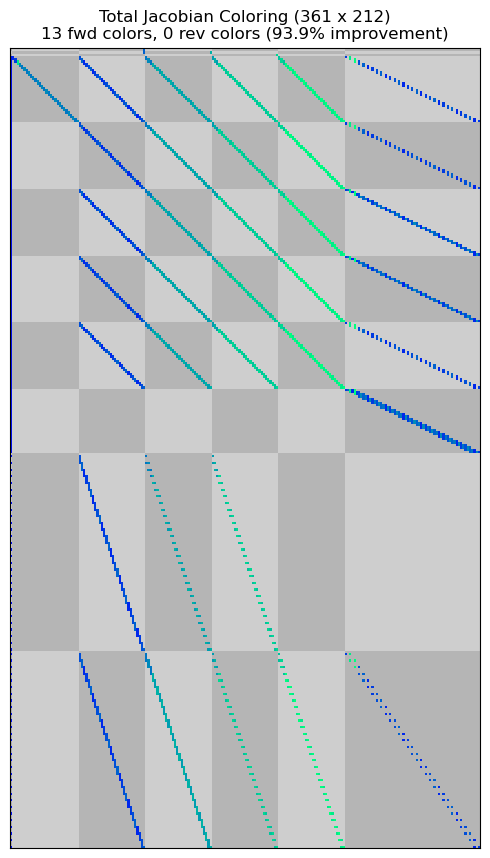
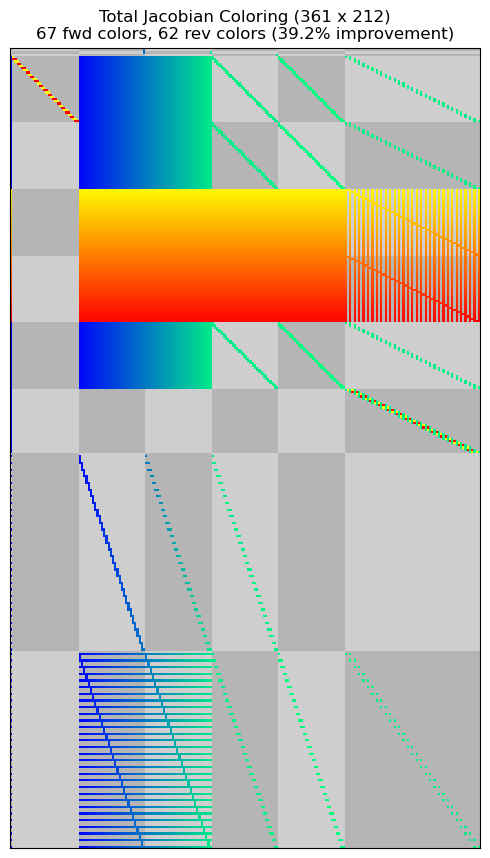
The sparsity patterns of the resulting total-derivative jacobian matrices are shown below. Finite differencing without partial derivative coloring causes the sparsity pattern to be dense for a large portion of the matrix. Since the dynamic pressure affects all of the defect constraints, the algorithm treats each defect constraint as if it is potentially dependent upon all altitude and velocity values throughout the phase. However, if partial derivative coloring is used, OpenMDAO recovers the same sparsity pattern as seen in the analytic derivative case.
import os
import matplotlib.pyplot as plt
import shutil
import openmdao.api as om
import dymos as dm
from dymos.examples.min_time_climb.test.min_time_climb_ode_partial_coloring import MinTimeClimbODE
for fd in (False, True):
if fd:
pc_options = (False, True)
else:
pc_options = (False,)
for pc in pc_options:
header = 'Finite differenced component' if fd else 'Analytic derivatives in component'
header += ' with partial coloring' if pc else ''
#
# Instantiate the problem and configure the optimization driver
#
p = om.Problem(model=om.Group())
p.driver = om.pyOptSparseDriver()
p.driver.options['optimizer'] = 'IPOPT'
p.driver.options['print_results'] = False
p.driver.opt_settings['max_iter'] = 500
p.driver.opt_settings['print_level'] = 0
p.driver.opt_settings['nlp_scaling_method'] = 'gradient-based'
p.driver.opt_settings['tol'] = 1.0E-6
p.driver.opt_settings['mu_strategy'] = 'adaptive'
p.driver.opt_settings['bound_mult_init_method'] = 'mu-based'
p.driver.opt_settings['mu_init'] = 0.01
p.driver.declare_coloring(tol=1.0E-12)
#
# Instantiate the trajectory and phase
#
traj = dm.Trajectory()
phase = dm.Phase(ode_class=MinTimeClimbODE,
ode_init_kwargs={'fd': fd, 'partial_coloring': pc},
transcription=dm.GaussLobatto(num_segments=30))
traj.add_phase('phase0', phase)
p.model.add_subsystem('traj', traj)
#
# Set the options on the optimization variables
#
phase.set_time_options(fix_initial=True, duration_bounds=(50, 400),
duration_ref=100.0)
phase.add_state('r', fix_initial=True, lower=0, upper=1.0E6,
ref=1.0E3, defect_ref=1.0E3, units='m',
rate_source='flight_dynamics.r_dot')
phase.add_state('h', fix_initial=True, lower=0, upper=20000.0,
ref=1.0E2, defect_ref=1.0E2, units='m',
rate_source='flight_dynamics.h_dot')
phase.add_state('v', fix_initial=True, lower=10.0,
ref=1.0E2, defect_ref=1.0E2, units='m/s',
rate_source='flight_dynamics.v_dot')
phase.add_state('gam', fix_initial=True, lower=-1.5, upper=1.5,
ref=1.0, defect_ref=1.0, units='rad',
rate_source='flight_dynamics.gam_dot')
phase.add_state('m', fix_initial=True, lower=10.0, upper=1.0E5,
ref=1.0E3, defect_ref=1.0E3, units='kg',
rate_source='prop.m_dot')
phase.add_control('alpha', units='deg', lower=-8.0, upper=8.0, scaler=1.0,
rate_continuity=True, rate_continuity_scaler=100.0,
rate2_continuity=False, targets=['alpha'])
phase.add_parameter('S', val=49.2386, units='m**2', opt=False, targets=['S'])
phase.add_parameter('Isp', val=1600.0, units='s', opt=False, targets=['Isp'])
phase.add_parameter('throttle', val=1.0, opt=False, targets=['throttle'])
#
# Setup the boundary and path constraints
#
phase.add_boundary_constraint('h', loc='final', equals=20000, scaler=1.0E-3)
phase.add_boundary_constraint('aero.mach', loc='final', equals=1.0)
phase.add_boundary_constraint('gam', loc='final', equals=0.0)
phase.add_path_constraint(name='h', lower=100.0, upper=20000, ref=20000)
phase.add_path_constraint(name='aero.mach', lower=0.1, upper=1.8)
# Minimize time at the end of the phase
phase.add_objective('time', loc='final', ref=100.0)
p.model.options['assembled_jac_type'] = 'csc'
p.model.linear_solver = om.DirectSolver(assemble_jac=True)
#
# Setup the problem and set the initial guess
#
p.setup()
p['traj.phase0.t_initial'] = 0.0
p['traj.phase0.t_duration'] = 400
p['traj.phase0.states:r'] = phase.interp('r', [0.0, 50000.0])
p['traj.phase0.states:h'] = phase.interp('h', [100.0, 20000.0])
p['traj.phase0.states:v'] = phase.interp('v', [135.964, 283.159])
p['traj.phase0.states:gam'] = phase.interp('gam', [0.0, 0.0])
p['traj.phase0.states:m'] = phase.interp('m', [19030.468, 10000.])
p['traj.phase0.controls:alpha'] = phase.interp('alpha', [0.0, 0.0])
#
# Solve for the optimal trajectory
#
print(80 * '-')
print(f'{"--- " + header + " ":-<80}')
print(80 * '-', '\n')
dm.run_problem(p)
#
# This code is intended to save the coloring plots for the documentation.
# In practice, use the command line interface to view these files instead:
# `openmdao view_coloring coloring_files/total_coloring.pkl --view`
#
from openmdao import __version__ as om_version
om_version_tup = tuple((int(s) for s in om_version.split('-')[0].split('.')))
# Handle the output directory behavior change as of OpenMAO 3.34.3-dev
stfd = '_fd' if fd else ''
stpc = '_pc' if pc else ''
if om_version_tup > (3, 34, 2):
saved_coloring_dir = f'coloring_files{stfd}{stpc}'
if os.path.exists(saved_coloring_dir):
shutil.rmtree(saved_coloring_dir)
shutil.move(p.get_coloring_dir(mode='output'), saved_coloring_dir)
_view_coloring(os.path.join(saved_coloring_dir, 'total_coloring.pkl'))
else:
coloring_dir = f'coloring_files{stfd}{stpc}'
if fd or pc:
if os.path.exists(coloring_dir):
shutil.rmtree(coloring_dir)
shutil.move('coloring_files', coloring_dir)
_view_coloring(os.path.join(coloring_dir, 'total_coloring.pkl'))
--------------------------------------------------------------------------------
--- Analytic derivatives in component ------------------------------------------
--------------------------------------------------------------------------------
/home/runner/work/dymos/dymos/.openmdao-pixi/.pixi/envs/dev/lib/python3.13/site-packages/openmdao/utils/relevance.py:1234: OpenMDAOWarning:The top level group has a nonlinear solver that computes gradients, so the entire model will be included in the optimization iteration.
Jacobian shape: (361, 212) (3.44% nonzero)
FWD solves: 13 REV solves: 0
Total colors vs. total size: 13 vs 212 (93.87% improvement)
Sparsity computed using tolerance: 1e-12.
Dense total jacobian for Problem 'problem' was computed 3 times.
Time to compute sparsity: 0.1256 sec
Time to compute coloring: 0.2893 sec
Memory to compute coloring: 0.3867 MB
Coloring created on: 2026-05-13 15:04:02
/home/runner/work/dymos/dymos/.openmdao-pixi/.pixi/envs/dev/lib/python3.13/site-packages/openmdao/core/total_jac.py:1670: DerivativesWarning:The following constraints or objectives cannot be impacted by the design variables of the problem at the current design point:
traj.phase0.h[path], inds=[(0, 0)]
traj.phase0.mach[path], inds=[(0, 0)]
/home/runner/work/dymos/dymos/.openmdao-pixi/.pixi/envs/dev/lib/python3.13/site-packages/openmdao/utils/coloring.py:1448: OMDeprecationWarning:display is deprecated. Use display_bokeh for rich html displays of coloringor display_txt for a text-based display.
/home/runner/work/dymos/dymos/.openmdao-pixi/.pixi/envs/dev/lib/python3.13/site-packages/openmdao/utils/relevance.py:1234: OpenMDAOWarning:The top level group has a nonlinear solver that computes gradients, so the entire model will be included in the optimization iteration.
Jacobian shape: (361, 212) (3.44% nonzero)
FWD solves: 13 REV solves: 0
Total colors vs. total size: 13 vs 212 (93.87% improvement)
Sparsity computed using tolerance: 1e-12.
Dense total jacobian for Problem 'problem' was computed 3 times.
Time to compute sparsity: 0.1256 sec
Time to compute coloring: 0.2893 sec
Memory to compute coloring: 0.3867 MB
Coloring created on: 2026-05-13 15:04:02
--------------------------------------------------------------------------------
--- Finite differenced component -----------------------------------------------
--------------------------------------------------------------------------------
Jacobian shape: (361, 212) (23.30% nonzero)
FWD solves: 67 REV solves: 62
Total colors vs. total size: 129 vs 212 (39.15% improvement)
Sparsity computed using tolerance: 1e-12.
Dense total jacobian for Problem 'problem2' was computed 3 times.
Time to compute sparsity: 0.1639 sec
Time to compute coloring: 1.1100 sec
Memory to compute coloring: 22.6875 MB
Coloring created on: 2026-05-13 15:04:19
/home/runner/work/dymos/dymos/.openmdao-pixi/.pixi/envs/dev/lib/python3.13/site-packages/openmdao/core/total_jac.py:1670: DerivativesWarning:The following constraints or objectives cannot be impacted by the design variables of the problem at the current design point:
traj.phase0.h[path], inds=[(0, 0)]
traj.phase0.mach[path], inds=[(0, 0)]
<Figure size 550x550 with 0 Axes>
Jacobian shape: (361, 212) (23.30% nonzero)
FWD solves: 67 REV solves: 62
Total colors vs. total size: 129 vs 212 (39.15% improvement)
Sparsity computed using tolerance: 1e-12.
Dense total jacobian for Problem 'problem2' was computed 3 times.
Time to compute sparsity: 0.1639 sec
Time to compute coloring: 1.1100 sec
Memory to compute coloring: 22.6875 MB
Coloring created on: 2026-05-13 15:04:19
--------------------------------------------------------------------------------
--- Finite differenced component with partial coloring -------------------------
--------------------------------------------------------------------------------
/home/runner/work/dymos/dymos/.openmdao-pixi/.pixi/envs/dev/lib/python3.13/site-packages/openmdao/utils/relevance.py:1234: OpenMDAOWarning:The top level group has a nonlinear solver that computes gradients, so the entire model will be included in the optimization iteration.
Coloring for 'traj.phases.phase0.rhs_disc.aero.q_comp' (class DynamicPressureCompFD)
Jacobian shape: (60, 120) (1.67% nonzero)
FWD solves: 2 REV solves: 0
Total colors vs. total size: 2 vs 120 (98.33% improvement)
Sparsity computed using tolerance: 1e-06.
Dense partial jacobian for DynamicPressureCompFD 'traj.phases.phase0.rhs_disc.aero.q_comp' was computed 2 times.
Time to compute sparsity: 0.0082 sec
Time to compute coloring: 0.0062 sec
Memory to compute coloring: 0.0000 MB
Coloring for 'traj.phases.phase0.rhs_col.aero.q_comp' (class DynamicPressureCompFD)
Jacobian shape: (30, 60) (3.33% nonzero)
FWD solves: 2 REV solves: 0
Total colors vs. total size: 2 vs 60 (96.67% improvement)
Sparsity computed using tolerance: 1e-06.
Dense partial jacobian for DynamicPressureCompFD 'traj.phases.phase0.rhs_col.aero.q_comp' was computed 2 times.
Time to compute sparsity: 0.0040 sec
Time to compute coloring: 0.0032 sec
Memory to compute coloring: 0.0000 MB
Jacobian shape: (361, 212) (3.44% nonzero)
FWD solves: 13 REV solves: 0
Total colors vs. total size: 13 vs 212 (93.87% improvement)
Sparsity computed using tolerance: 1e-12.
Dense total jacobian for Problem 'problem3' was computed 3 times.
Time to compute sparsity: 0.1731 sec
Time to compute coloring: 0.2898 sec
Memory to compute coloring: 0.0000 MB
Coloring created on: 2026-05-13 15:04:33
/home/runner/work/dymos/dymos/.openmdao-pixi/.pixi/envs/dev/lib/python3.13/site-packages/openmdao/core/total_jac.py:1670: DerivativesWarning:The following constraints or objectives cannot be impacted by the design variables of the problem at the current design point:
traj.phase0.h[path], inds=[(0, 0)]
traj.phase0.mach[path], inds=[(0, 0)]
<Figure size 550x550 with 0 Axes>
Jacobian shape: (361, 212) (3.44% nonzero)
FWD solves: 13 REV solves: 0
Total colors vs. total size: 13 vs 212 (93.87% improvement)
Sparsity computed using tolerance: 1e-12.
Dense total jacobian for Problem 'problem3' was computed 3 times.
Time to compute sparsity: 0.1731 sec
Time to compute coloring: 0.2898 sec
Memory to compute coloring: 0.0000 MB
Coloring created on: 2026-05-13 15:04:33
<Figure size 550x550 with 0 Axes>
Performance comparison#
In this instance, the following performance was noted for the minimum time-to-climb case with 30 Gauss-Lobatto segments.
Using OpenMDAO’s partial derivative coloring buys back a signficant amount of performance lost to finite differencing.
It should be noted that the IPOPT option alpha_for_y can have a signficant impact on performance here.
The default ‘primal’ step results in faster convergence for the sparse analytic case, but results in problematic convergence for the finite-differenced versions.
Switching the option using p.driver.opt_settings['alpha_for_y'] = 'safer-min-dual-infeas' results in a ‘safer’ step size and faster convergence of the finite-differenced versions, at the expense of some time in the analytic case.
The table below shows approximate run times normalized by the analytic version of the problem’s run time.
Derivative Type |
Normalized Optimization Time |
|---|---|
Sparse Analytic |
1.0 |
Finite Difference (Dense) |
~1.5 to ~2.5 |
Finite Difference (with Coloring) |
~1.0 to ~1.5 |
Another note is that even in the finite differencing cases only a single component, the dynamic pressure component, is being switch to use finite differencing. Doing so completely destroys the sparsity of the system, requiring over 10x as many solves of the resulting linear system to compute the total derivatives across the model. This is an important lesson: Failing to employ sparsity everywhere in a complex model can completely negate its benefit. However, you can buy back a significant portion of this lost performance using partial coloring.